
Adaptive Regelung am Quadrocopter #7: Gesamtsystemsimulation – Implementierung der Reglervarianten
Zum vorherigen Beitrag: Identifikation sekundärer Pfad und Wahl der Reglerparameter
Zum nachfolgenden Regler: Erste Prototypisierung mit einem DSpace System
Hallo liebe OpenAdaptroniker,
Heute geht es weiter mit der Gesamtsystemsimulation. Ich werde die verschiedenen Varianten der Feedforward- und Feedbackregler, die ich implementiert habe, aufführen.
Die Anregung (siehe Anregungsmodellierung) am Quadrocopter in z-Richtung im Schwebeflug besteht aus einer breitbandigen Rauschanregung , aus der Eigenfrequenz der Starrkörpermode in 3Hz und aus den Überhöhungen in 70 Hz, 120 Hz, 187 Hz, 284 Hz und 370 Hz. Aus der Analyse der Anregung haben wir mit David festgestellt, dass die Motorordnungen bei Vielfachen von 90 Hz liegen. Die im Flug gemessenen Überhöhungen in 70 Hz und 120 Hz am Kameraaufhängungspunkt entsprechen angeregten Eigenfrequenzen der Quadrocopterstruktur (siehe Übertragungsspektrum von Knoten 5 zu 5).
Implementierung Feedback-Regler
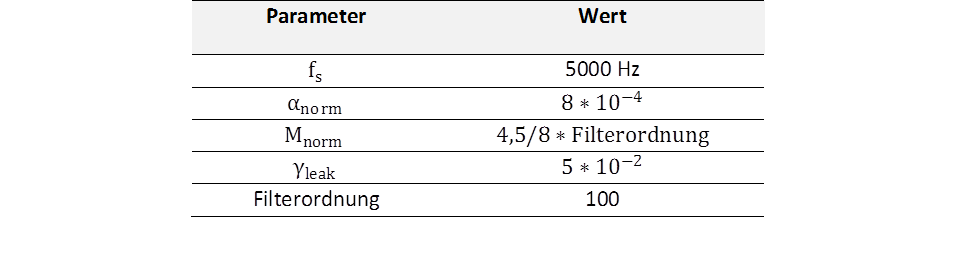
Basierend auf ihrem Einfluss und den genannten Methoden, habe ich iterativ die Reglerparameter bestimmt und optimiert. Für den einfachen Feedback-Regler sind die erhaltenen Reglerparameter folgende:
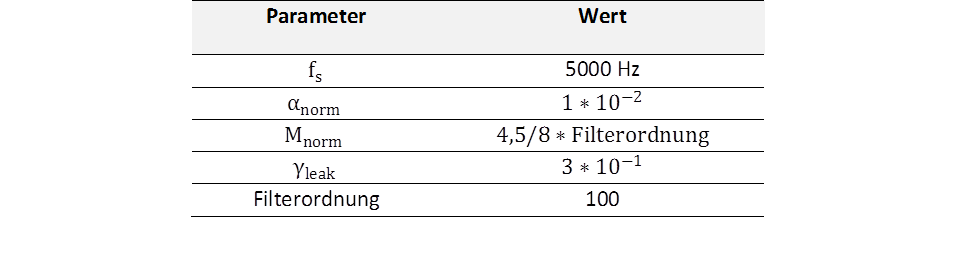
Trotz Parameteroptimierung wird keine Schwingungsminderung beobachtet.
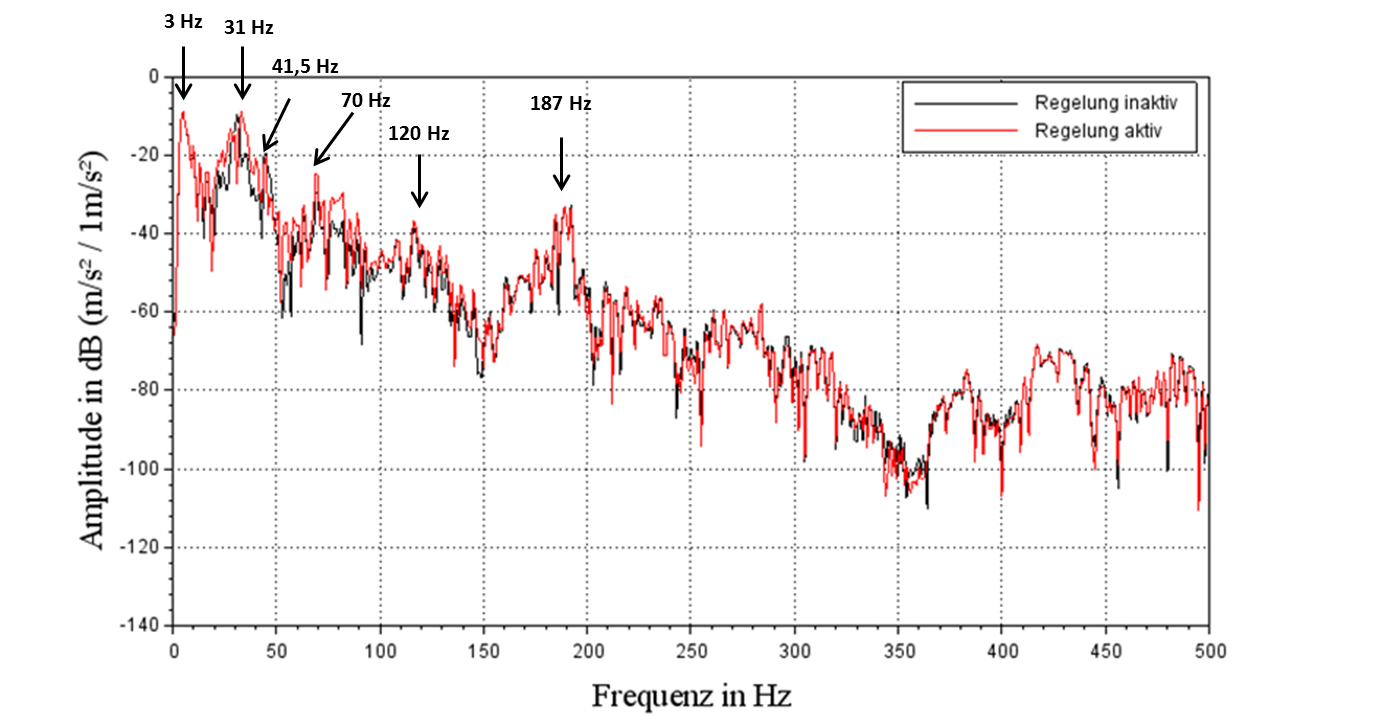
Abbildung: Simulation – Frequenzspektren der Beschleunigungen an der Kamera mit und ohne Feedback-Regelung
Im Frequenzspektrum der Beschleunigungen an der Kamera erkennt man die genannten Überhöhungen aus der Anregung. Durch die breitbandige Rauschanregung zwischen den Überhöhungen werden zwei Eigenfrequenzen der mechanischen Struktur angeregt: in 31Hz (entspricht dem Ein-Massenschwinger-Verhalten der Kamera +Aktor) und 41,5Hz aus der Übertragung der mechanischen Struktur.
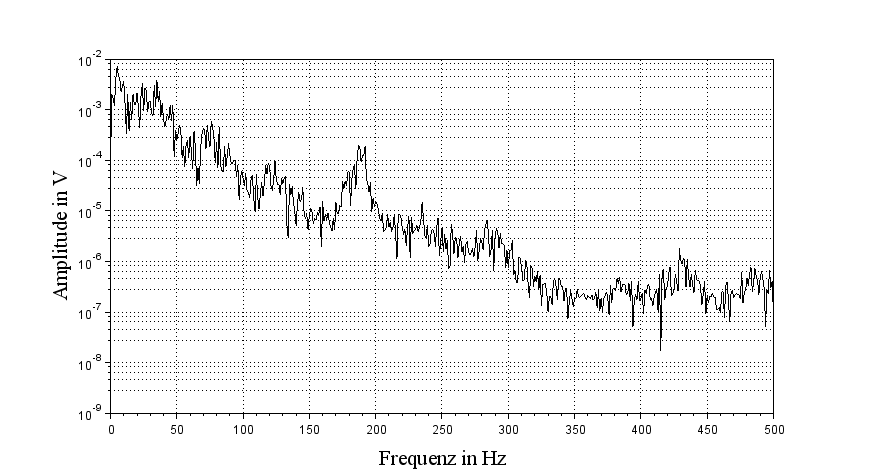
Abbildung: Simulation – Frequenzspektrum des Stellsignals am Regler-Ausgang bei breitbandiger Anregung
Im Stellsignal am Ausgang des Reglers kann man folgendes beobachten: Die Amplitude in 3Hz (gleiche Größenordnung wie Amplituden in 31 bzw. 41,5Hz) ist um den Faktor 40, 50 bzw. 40 größer als die Amplituden in 70, 119 bzw. 187Hz. Die große Spanne zwischen den höchsten und den niedrigsten Amplituden führt zu einem Zielkonflikt in der Parameteroptimierung, den ich nachfolgend erklären werde. Dafür sind folgende zwei Gleichungen zur Berechnung der LMS-Schrittweite und des Leakage-Faktors von Interesse (aus dem Blogbeitrag 5) :

mit der normierten Schrittweite α, der Filterordnung N vom adaptiven Filter W(z), der Schätzung der Leistung des Referenzsignals Px(n)^ zum Zeitpunkt n und dem Gewichtungsfaktor γ C [0;1].
Der Leakage-Faktor ist unter anderem über die Schrittweite inversproportional zur Schätzung der Leistung des Referenzsignals. Bei hoher Leistung des Referenzsignals wird die Schrittweite klein, der Leakage-Faktor groß, sodass die Ausgangsenergie des Reglers stark begrenzt wird und Divergenzen vermieden werden. Anders herum wird bei niedriger Eingangsleistung die Schrittweite groß, der Leakage-Faktor klein, und die Grenze der minimal erreichbaren mittleren quadratischen Abweichung wird reduziert, die Reglerperformance verbessert. Über den Leakage-Gewichtungsfaktor und die normierte Schrittweite kann die Person die implementiert den Bereich der Veränderung des Leakage-Faktors festlegen. Bei der breitbandigen Anregung entstehen in unserem System Schwingungen mit hohen und niedrigen Amplituden. Im oben implementierten Fall, wird der Leakage-Gewichtungsfaktor so weit reduziert, dass das System stabil arbeitet. Jedoch arbeitet das System dadurch nicht hochfrequent bei den Amplituden kleinerer Leistungsdichte, sondern hauptsächlich in den Eigenfrequenzen bei 31 und 41,5Hz und der Starrkörpermode in 3 Hz. In den Eigenfrequenzen wird keine Reduzierung erreicht, bedingt durch die eingeführte Phasenverschiebung aus der mechanischen Struktur in diesen Frequenzen. Für die Eigenfrequenz der Starrkörpermode wird keine Minderung erwartet, da sie großen Auslenkungen entspricht, die mit dem Visaton nicht zu beruhigen sind.
In den nachfolgend implementierten Erweiterungen wird versucht die störenden hohen Amplituden aus dem Stellsignal zu entfernen, sodass der Leakage-Gewichtungsfaktor reduziert werden kann, und eine Minderung hochfrequent erreicht werden kann.
Feedback-Regler mit Erweiterungen
Um das besagte Zielkonflikt zu vermeiden, habe ich zunächst eine Erweiterung mit Hochpassfiltern implementiert. In dieser Variante werden das Referenzsignal und das Fehlersignal vor Eingang in den LMS-Algorithmus (nicht das Eingangssignal in den adaptiven Filter) mit einem Hochpass gefiltert. Somit wird angestrebt die hohen Amplituden im niederfrequenten Frequenzbereich aus den Signalen zu entfernen. Ich habe dafür einen digitalen Hochpassfilter der fünften Ordnung jeweils implementiert, der der Reihenschaltung von fünf Hochpassfiltern erster Ordnung mit folgender Übertragung entspricht:
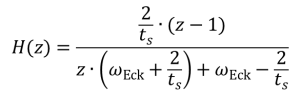
mit der Abtastperiode ts und der Eckfrequenz ω_eck. Die Eckfrequenz habe ich auf 60 Hz festgelegt, um die Überhöhungen in 3 Hz, 23 Hz und 41,5 Hz zu reduzieren ohne die Überhöhung in 70 Hz zu reduzieren. Die Hochpassfilterung hat erfolgreich die Starrkörpermode bei 3 Hz aus den Signalen entfernt bzw. vermindert, aber nicht ausreichend die Überhöhung in den Eigenfrequenzen, weshalb ich zusätzlich noch eine Pol-Kompensation implementiert habe.
Die Eigenfrequenz eines Systems entspricht einer Polstelle seiner Übertragungsfunktion im Laplace-Bereich (Polstelle=Nullstelle im Nennerpolynom). Die Pol-Kompensation ermöglicht es anhand einer weiteren in Serie geschalteten Übertragungsfunktion die Pole eines Systems zu verschieben bzw. zu kompensieren. Eine solche Pol-Kompensation wurde am Fraunhofer erfolgreich an einem realen Inertialmassenaktor zur Reduzierung des Spill-Over-Effektes implementiert und getestet. Basierend auf dieser Arbeit habe ich zwei Kompensatoren am Ausgang des Reglers in der Simulation implementiert. Deren Übertragungsfunktion ist folgende:

mit der Designfrequenz ω_c (50 Hz für beide Kompensatoren),
a0=ω_c^4, a1=4*ω_c^3, a2=6*ω_c², a3=4*ω_c,
c0=R*k, c1=R*d+L*k+ψ², c2=R*m_ima+L*d, c3=L*m_ima.
R, L, k und ψ sind dabei der elektrische Widerstand, die Induktivität, die mechanische Steifigkeit und der elektromechanische Kopplungsfaktor (elektr.-> mech.) des Visatons EX45S. Somit können die Amplitudenüberhöhungen in den Eigenfrequenzen reduziert werden, die Phasenverschiebung in den Eigenfrequenzen muss dennoch in eine andere Frequenz verschoben werden. Die Designfrequenz entspricht der Frequenz, in der die Phasenverschiebung der kompensierten Eigenfrequenz (31 Hz bzw. 41,5 Hz) versetzt wird.
Für den 31Hz Kompensator habe ich für m_ima die Masse der Kamera verwendet. Für die Eigenfrequenz in 41,5 Hz habe ich eine virtuelle Masse des zugehörigen IMAs vereinfacht aus der Beziehung der Eigenfrequenz für den ungedämpften Ein-Massen-Schwinger berechnet (w=(k/m)^0,5 ). Somit ergibt sich die Masse m_ima_41,5=82,8g. Ich habe die Designfrequenz der Kompensatoren iterativ bestimmt, sodass folgende zwei Kriterien erfüllt sind. Erstens, eine Minderung von mindestens 15dB in 31 Hz, weil sonst die Amplitude in 31 Hz im Stellsignal zu groß ist um eine Schwingungsminderung zu erreichen, zweitens eine eingeführte Phasenverschiebung in 70 Hz und darüber hinaus breitbandig, die nicht zu groß ist.
Der mit der Hochpassfilterung und der Pol-Kompensation implementierte Regler ergibt folgende Reglerparameter:
Das Stellsignal am Ausgang des Reglers zeigt die Wirkung der Hochpassfilter und der Pol-Kompensation durch niedrigere Amplituden im niederfrequenten Bereich.
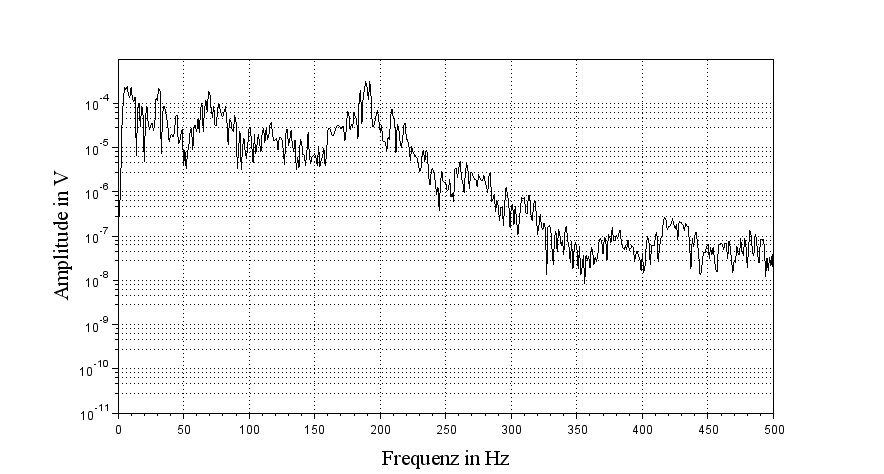
Abbildung: Simulation – Frequenzspektrum des Stellsignals mit dem Feedback-Regler (mit Hochpassfilter und Pol-Kompensator)
Der implementierte Regler ermöglicht eine geringe Schwingungsminderung im Bereich um 70 Hz und 119 Hz (ca. 1,5 dB), und im Bereich um 187 Hz (mit 5,5dB in 187 Hz).
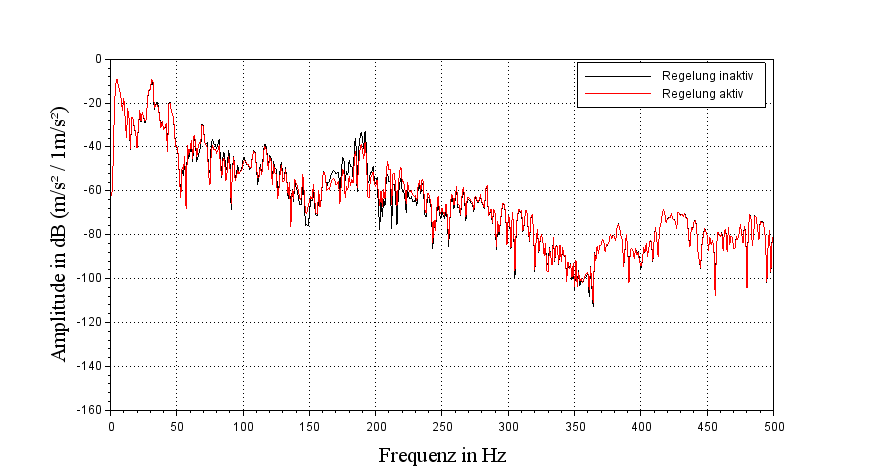
Abbildung: Frequenzspektren der Beschleunigungen an der Kamera mit und ohne Feedback-Regelung (mit Hochpassfilter und Pol-Kompensation)
Die geringe Reduktion lässt sich auf die, durch die Kompensatoren eingeführte, Phasenverschiebung in den Frequenzen um 70 Hz, 120 Hz und 287 Hz rückführen.
Implementierung Feedforward-Regler
Abschließend habe ich die Feedforward-Regelung implementiert. Dort wird das Referenzsignal nicht aus dem Fehlersignal berechnet, sondern durch einen extra Beschleunigungssensor der die Anregung misst (siehe Blogbeitrag 5) erstellt. In der Simulation habe ich das Anregungssignal (siehe Blogbeitrag 3) über ein weiteres Sensormodell, einer AD –Wandlung und einer AAF-Filterung in den Regler zurückgeführt.
Das hat den Vorteil, dass die angeregten Eigenfrequenzen in 31 Hz und 41,5 Hz nicht im Referenzsignal enthalten sind. Ich habe den Regler mit der Hochpassfilterung implementiert, um die Eigenfrequenz der Starrkörpermode aus dem Stellsignal zu entfernen. Mit folgenden Reglerparametern erhalte ich somit eine breitbandige Schwingungsminderung:
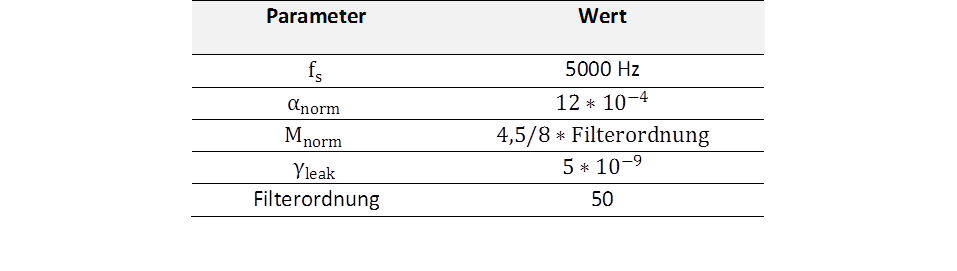
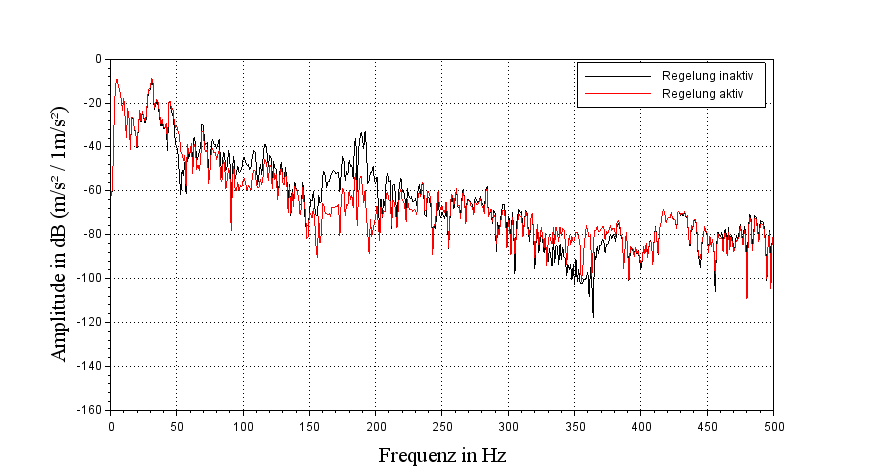
Abbildung: Frequenzspektren der Beschleunigungen an der Kamera mit und ohne Feedforward-Regelung (mit Hochpassfilter)
Die Verstärkung zwischen 300 und 370 Hz ist auf Fehler in der experimentellen Modalanalyse der Quadrocopterstruktur zurückzuführen, in der eine sehr ausgeprägte Nullstelle in diesem Frequenzbereich in der Übertragung von Knoten 5 zu Knoten 5 identifiziert wurde. Somit wird die Breitbandige Rauschanregung dort sehr stark gedämpft, was nicht der Realität entspricht.
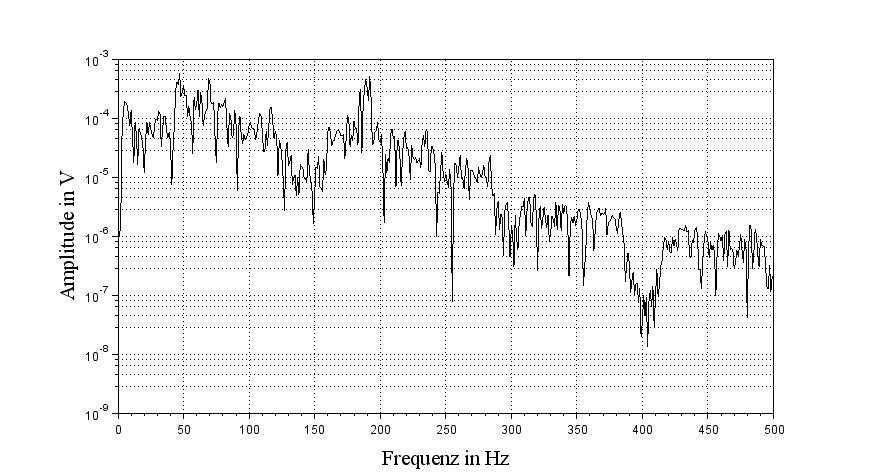
Abbildung: Simulation – Frequenzspektrum des Stellsignals mit dem Feedforward-Regler
Im nächsten Beitrag geht es weiter mit der Implementierung des aktiven Schwingungsminderungssystems am Quadrocopter über ein DSpace-System.
Bis bald!
Nicolas Baleynaud
Schreibe einen Kommentar