
Methoden der aktiven Schwingungsdämpfung #3 Breitbandige Feedforward-Regelung
Hallo Zusammen! Ich bin Ruo Yi. In den letzten Beitragen habt ihr vielleicht eine Überblick über die aktive Schwingungsdämpfung erhalten und euch schon über den sehr wichtigen LMS-Algorithmus des Parameteradaption informiert. Nun gehen wir auf eine gängige Methode der aktiven Schwingungsdämpfung ein: Breitbandige Feedforward-Regelung. Bei der breitbandigen Feedforward-Regelung wird die Schwingung über einen großen Frequenzbereich reduziert (Siehe Bild 1). Dazu wird ein Referenzsignal verwendet, um ausreichende Informationen über die Anregung vor der Generierung der Stellgröße zu erhalten. Die von der Anregung verursachte Schwingung bzw. Vibration wird an der Stelle des Aktors kompensiert.
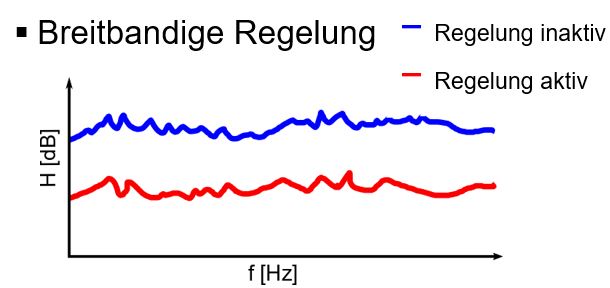
Bild1: Schematische Darstellung der breitbandigen Regelung
Effekte sekundärer Strecke
Die aktive Schwingungsminderung ist dadurch gekennzeichnet, dass ein Aktor zur Beruhigung der Struktur in einem System eingesetzt wird. Basierend auf dem LMS-Algorithmus kann ein System mit aktiver Schwingungsdämpfung wie in Bild2 dargestellt werden. Dabei steht das Referenzsignal [latex]x(n)[/latex] für die Schwingung an der Schwingungsquelle und das Fehlersignal [latex]e(n)[/latex] für die Schwingung an der zu beruhigenden Stelle. Streng genommen steht die sekundäre Strecke hierbei nicht nur für einen Aktor, sondern für das ganze Stellgliedsystem inklusive D/A-Wandler, Rekonstruktionsfilter, Leistungsverstärker, Aktor, Fehlersensor und A/D-Wandler. Um [latex]d(n)[/latex] vollständig zu unterdrücken, soll der Aktor idealerweise eine Gegenschwingung mit gleicher Amplitude, aber entgegengesetzter Phase von [latex]d(n)[/latex] erzeugen. Offensichtlich ist dies der Fall, wenn der Filter [latex]W(z)[/latex] die optimale Übertragungsfunktion

besitzt. D.h. der Filter [latex]W(z)[/latex] muss nicht nur die primäre Strecke [latex]P(z)[/latex], sondern auch die invertierte sekundäre Strecke [latex]\frac{1}{S(z)}[/latex] modellieren. Um eine rationale Funktion [latex]\frac{P(z)}{S(z)}[/latex] zu approximieren, wird ein FIR-Filter mit ausreichend hoher Ordnung benötigt. Es ist unmöglich, die inhärente Verzögerung aufgrund von [latex]S(z)[/latex] zu kompensieren, wenn [latex]P(z)[/latex] keine Verzögerung von mindestens gleicher Länge enthält [1].

Bild2: Struktur inklusive sekundärer Strecke [1]
FxLMS-Algorithmus
Die einfache Verwendung des LMS Algorithmus bei Vorliegen einer sekundären Strecke [latex]S(z)[/latex] führt zu Instabilität [3]. Dies ist auf die zeitliche Signalverzögerung, die durch die sekundäre Strecke eingebracht wird, zurückzuführen. Es gibt jedoch verschiedene Wege, die Strecke [latex]S(z)[/latex] bei der Implementierung des Algorithmus so zu berücksichtigen, dass sicher stabiles Verhalten eingestellt werden kann [4]. Die wohl am häufigsten eingesetzte Methode ist, das Referenzsignal [latex]x(n)[/latex] mit einem Abbild [latex]\widehat{S}(z)[/latex] der sekundären Strecke zu filtern, bevor es dem LMS-Algorithmus zugeführt wird. Es ergibt sich auf diese Weise der so genannte Filtered-x-LMS-Algorithmus (FxLMS-Algorithmus) [1][2][5]. Die entsprechende Berechnungsformel für die Filterkoeffizienten ist
![]()
Dabei steht [latex]x_{f}(n)[/latex] für das durch geschätzten Modell der sekundären Strecke gefilterte Referenzsignal. Die Bild3 zeigt die Struktur des FxLMS-Algorithmus.

Bild3: Struktur des FxLMS-Algorithmus
Die Herleitung des FxLMS-Algorithmus basiert auf der Annahme, dass sich die Koeffizienten des Filters [latex]W(z)[/latex] nur langsam, gemessen an den Zeitkonstanten des Systems, verändern, und dieses damit für einen gewissen Zeitraum als linear und zeitinvariant angenommen werden kann. Demzufolge ist es zulässig, die Reihenfolge von [latex]W(z)[/latex] und [latex]S(z)[/latex] zu vertauschen [5]. Wenn [latex]\widehat{S}(z)[/latex] exakt [latex]S(z)[/latex] entspricht, kann die Ausgabe des adaptiven Filters [latex]W(z)[/latex] nun direkt zu dem Fehlersignal geführt werden. Im diesem Fall kann der LMS-Algorithmus verwendet werden, obwohl das Referenzsignal für [latex]W(z)[/latex] nicht [latex]x(n)[/latex] sondern das durch die geschätzte sekundäre Strecke [latex]\widehat{S}(z)[/latex] gefilterte [latex]x_{f}(n)[/latex] ist. Die umgeformte Struktur des FxLMS-Algorithmus ist in Bild4 dargestellt.

Bild4: Umgeformte Struktur des FxLMS-Algorithmus[1]
Für die Implementierung vom FxLMS-Algorithmus spielt die Identifikation der sekundären Strecke eine wichtige Rolle. Das heißt, dass man ein Modell für [latex]S(z)[/latex] bestimmen soll. Das bestimmte Modell [latex]\widehat{S}(z)[/latex] soll sich der echten Strecke [latex]S(z)[/latex] möglichst gut annähern. In meiner Arbeit wird das Modell [latex]\widehat{S}(z)[/latex] hauptsächlich durch experimentale Verfahren identifiziert.
Eine Besonderheit dieses Algorithmus liegt darin, dass er sehr tolerant gegenüber Schätzfehlern zwischen dem geschätzten Modell [latex]\widehat{S}(z)[/latex] und der echten Strecke [latex]S(z)[/latex] ist. Nach [6] kann sich FxLMS-Algorithmus immer konvergieren, wenn die maximale Phasendifferenz zwischen dem geschätzten Modell [latex]\widehat{S}(z)[/latex] und der Strecke [latex]S(z)[/latex] innerhalb 90° ist.
Neben der breitbandigen Regelung gibt es noch die schmalbandige Regelung, die zur Schwingungsdämpfung breite Anwendung findet. In nächstem Beitrag gehen wir auf die schmalbandige Regelung ein. Bis dann:)
Letzter Beitrag:
Methoden der aktiven Schwingungsdämpfung #2 Parameteradaption mittels LMS-Algorithmus
Nächste Beitrag:
Methoden der aktiven Schwingungsdämpfung #4 Schmalbandige Feedforward-Regelung
Quellen:
[1] KUO , S. M. und D. R. MORGAN : Active Noise Control System. John Wiley & Sons. Inc., 1996
[2] PASCHEDAG, J.: Aktive Schwingungsisolation in Kfz-Motoraufhängungen – Systemkonfiguration und Methoden. Doktorarbeit. Technische Universität München, 2007
[3] ELLIOTT, S. J. und P. A. NELSON : The application of adaptive filtering to the active control of sound and vibration. In: Digital Library for Physics and Astronomy, 1985
[4] KUO, S. M. und D. R. MORGAN : Acitve Noise Control: A Tutorial Review. In: Proceedings ofthe IEEE, 1999
[5] WIDROW, B. und S. D. S TEARNS : Adaptive Signal Processing. Prentice Hall, 1960
[6] MORGAN, D.: An analysis of multiple correlation cancellation loops with a filter in the auxiliary path. In: IEEE Trans. Acoust., Speech, Signal Processing, vol. ASSP-28, 1980
Schreibe einen Kommentar