
Modellbildung LowCost-Aktorik – #2
vorheriger Post zu diesem Thema
Hallo OpenAdaptroniker,
von dem Entschluss aus meinem letzten Post, weitere Bauteile in das Simulationsmodell eingehen zu lassen, wird wieder Abstand genommen. Die Idee sieht nicht erfolgsversprechend aus. Zwar wäre das für die untersuchten Leistungsverstärker durchaus möglich, allerdings würde das Modell dabei einen Grad an Komplexität überschreiten, bei dem sich das Modell auch noch auf andere Leistungsverstärker gut und sinnvoll übertragen ließe.
Die Filter, die in den Datenblättern der Verstärker-Chips für die Anwendung auf Verstärker-Platinen vorgeschlagen werden, sind zwar grundsätzlich in den Verstärkern der Firma Sure umgesetzt, allerdings durch andere komplexe Schaltungen ergänzt. Somit lassen sich die Filter nicht gut mit vereinfachten Filtermodellen modellieren.
Aus diesem Grund nehmen wir für das Modell des Leistungsverstärkers zum größten Teil weiterhin eine Gray-Box an und bestimmen experimentell die Eck-Frequenzen.
Um die im letzten Post angesprochene überhöhte elektrische Resonanz im Simulationsmodell zu dämpfen, wird der Innenwiderstand des Verstärkers in das Modell aufgenommen.

Für das Simulationsmodell bleiben wir weiterhin bei der Darstellung im Zustandsraum. Allerdings betrachten wir der Übersichtlichkeit wegen den elektrischen und mechanischen Teil getrennt.
Zustandsraummodell für elektrisches System:
[latex]
z=
\begin{Bmatrix}
i_{lv} \\
i_{ima} \\
u_c
\end{Bmatrix}
\qquad
u=
\begin{Bmatrix}
u_{HB} \\
u_{ind}
\end{Bmatrix}
\qquad
y=
\begin{Bmatrix}
i_{ima} \\
u_{c}
\end{Bmatrix}
[/latex]
[latex]
A=
\begin{bmatrix}
-\frac{R_i}{L_{TP}} & 0 & -\frac{1}{L_{TP}} \\
0 & -\frac{R_{ima}}{L_{ima}} & \frac{1}{L_{ima}} \\
\frac{1}{C_{TP}} & -\frac{1}{C_{TP}} & 0
\end{bmatrix}
\qquad
B=
\begin{bmatrix}
\frac{1}{L_{TP}} & 0 \\
0 & -\frac{1}{L_{ima}} \\
0 & 0
\end{bmatrix}
\qquad
C=
\begin{bmatrix}
0 & 1 & 0 \\
0 & 0 & 1
\end{bmatrix}
\qquad
D=
\begin{bmatrix}
0 & 0 \\
0 & 0
\end{bmatrix}
[/latex]
Zustandsraummodell für mechanisches System:
[latex]
z=
\begin{Bmatrix}
x \\
\dot{x}
\end{Bmatrix}
\qquad
u=
\begin{Bmatrix}
F_{E}
\end{Bmatrix}
\qquad
y=
\begin{Bmatrix}
\dot{x}
\end{Bmatrix}
[/latex]
[latex]
A=
\begin{bmatrix}
0 & 1 \\
-\frac{k_{ima}}{m_{ima}} & -\frac{c_{ima}}{m_{ima}}
\end{bmatrix}
\qquad
B=
\begin{Bmatrix}
0 \\
\frac{1}{m_{ima}}
\end{Bmatrix}
\qquad
C=
\begin{bmatrix}
0 & 1
\end{bmatrix}
\qquad
D=
\begin{bmatrix}
0
\end{bmatrix}
[/latex]
Bestimmung des Innenwiderstandes [latex]R_i[/latex]:
Der Innenwiderstand des Leistungsverstärkers wird über den Wirkungsgrad des Leistungsverstärkers bestimmt. Dafür sind in Datenblättern zu den Verstärkern zwei Angaben zu finden. Der Wirkungsgrad [latex]\eta[/latex] bei einer bestimmten Leistung an einer bestimmten Last [latex]R_L[/latex]. Für den für uns passenden Leistungsbereich lässt sich so der Innenwiderstand [latex]R_i[/latex] abschätzen.
[latex]
R_i =
\dfrac{1-\eta}{\eta}\cdot R_L
[/latex]
Anpassung des Gains:
Die Funktion der PWM-Modulation und der H-Brücken-Schaltung wurde in dem bisherigen Simulationsmodell vereinfacht als ein Gain-Block dargestellt. Der Wert für diesen Verstärkungsfaktor wurde im Arbeitsbereich – also dort, wo weder Hoch- noch Tiefpässe ihren Einfluss zeigen – zwischen Eingang [latex]u_{lv,in}[/latex] und Ausgang [latex]u_{lv,out}[/latex] des Verstärkers gemessen. Also ist in diesem Wert der Spannungsabfall über dem Innenwiderstand [latex]R_i[/latex] schon inbegriffen. Die Spannung am Ausgang der H-Brücke [latex]u_{HB}[/latex] muss also entsprechend höher sein und somit auch in dem Simulationsmodell angepasst werden, da der Gain im Simulationsmodell die Verstärkung zwischen Verstärkereingang [latex]u_{lv,in}[/latex] und H-Brücken-Ausgang [latex]u_{HB}[/latex] darstellt und demnach den Spannungsabfall über dem Innenwiderstand [latex]R_i[/latex] nicht berücksichtigt.
Im Arbeitsbereich kann die Schaltung zu einer Reihenschaltung aus Innenwiderstand des Verstärkers [latex]R_i[/latex] und Widerstand des Aktors [latex]R_{ima}[/latex] vereinfacht werden. Damit kann der Gain für das Modell [latex]Gain_{HB}[/latex] einfach über den Spannungsteiler berechnet werden.
[latex]
Gain_{HB} =
\dfrac{R_i-R_{ima}}{R_{ima}}\cdot Gain_{Messung}
[/latex]
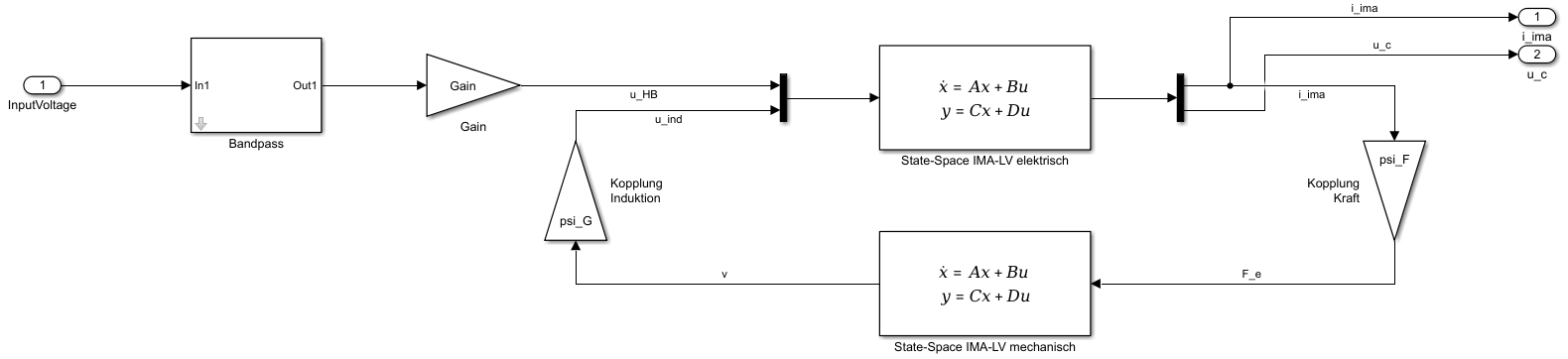
Das abschließende Simulink-Simulationsmodell sieht folgendermaßen aus:
Abgleich der Simulationsergebnisse mit den Messdaten
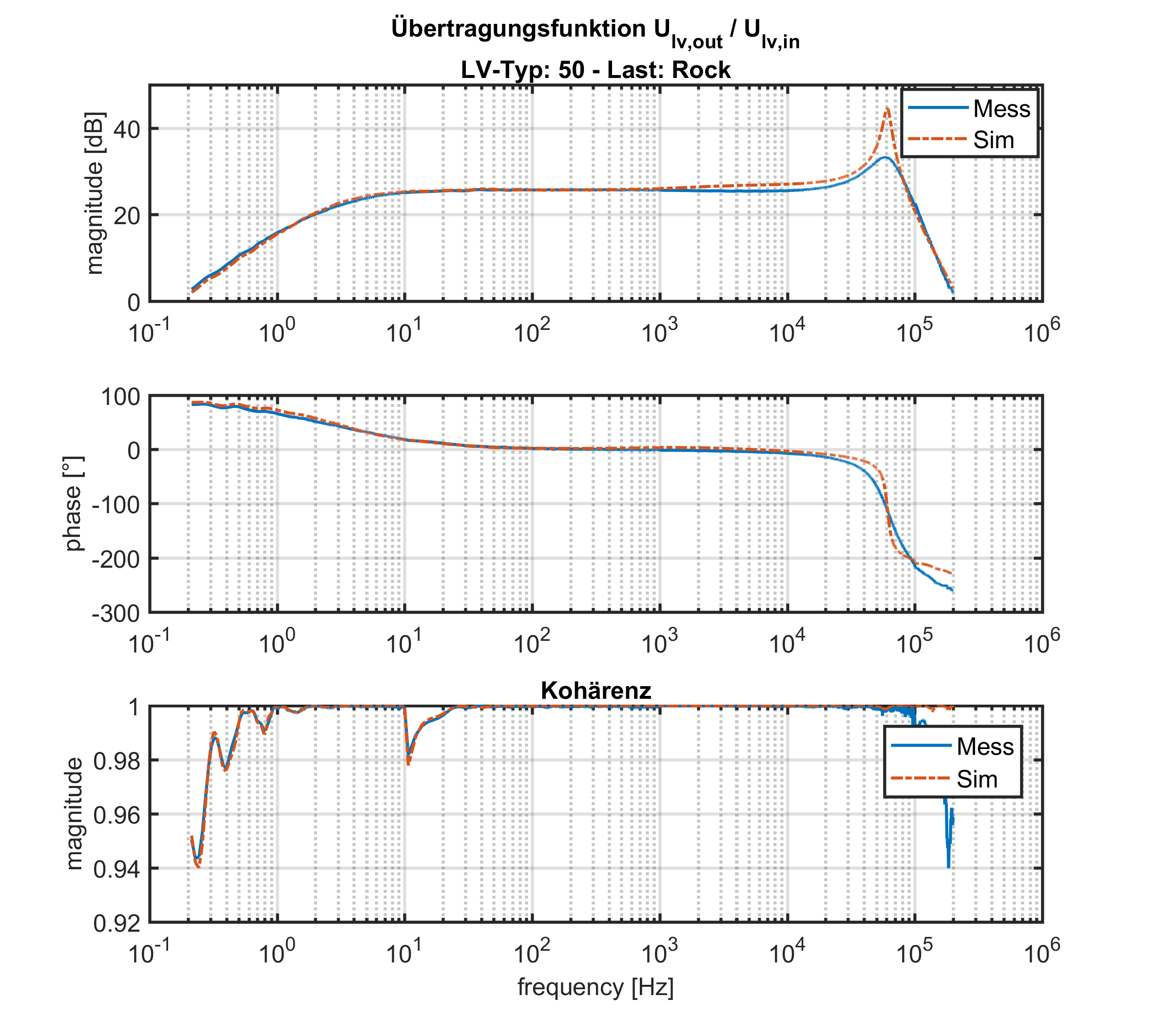
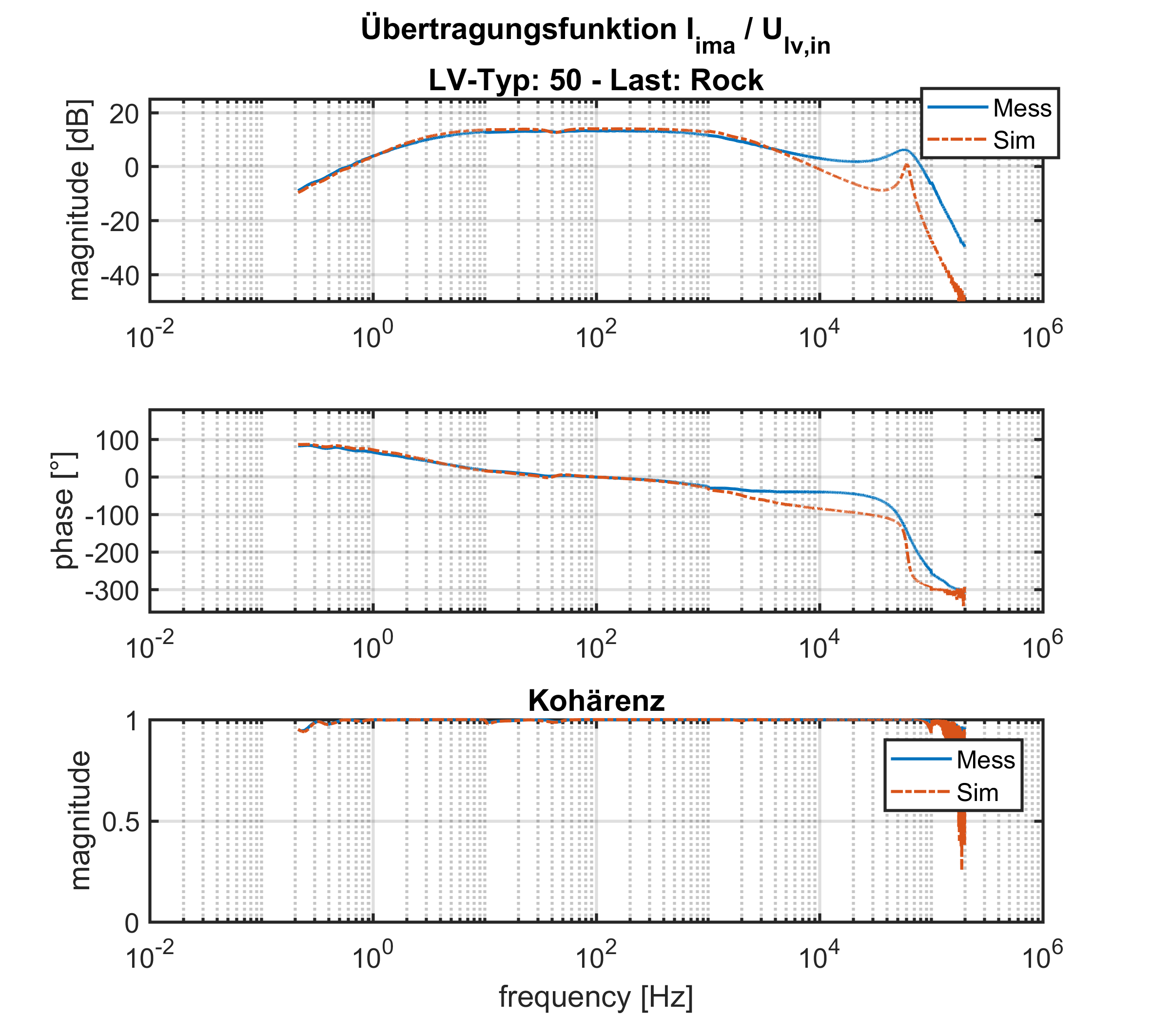
Noch immer passen Simulationsergebnisse und Messdaten im höheren Frequenzbereich nicht ideal zusammen. Der Grund dafür wird weiterhin die vereinfachte elektrische Darstellung der Induktivitäten (konstanter Widerstand, keine kapazitiven Eigenschaften) sein.
Allerdings sind nun die ausschlaggebenden Effekte in dem Simulationsmodell dargestellt.
Mit diesem Ergebnis verabschiede ich mich, denn mit diesem Post endet meine Zeit im OpenAdaptronik-Team. Ich wünsche weiterhin viel Erfolg und guten (wenig) Schwung in der Active Vibration Control!
Schreibe einen Kommentar