OpenAdaptronik ist ein vom BMBF gefördertes Projekt, welches aktive Systeme zur Schwingungsminderung für die Maker-Bewegung in der Photonik aufbereitet und so einer breiten Öffentlichkeit die Umsetzung von bildstabilisierenden Systemen, Schwingungsisolatoren für optische Instrumente und vielem mehr ermöglicht.
Hallo Zusammen. Ich bin Ruo Yi. In dem letzten Beitrag habe ich die erste Hälfte über die Generierung eigener neuen
Hallo Zusammen, ich bin Ruo Yi. In den letzten Beiträgen habe wir über den Aufbau der kostengünstigen modellbasierten Regelungsplattform und
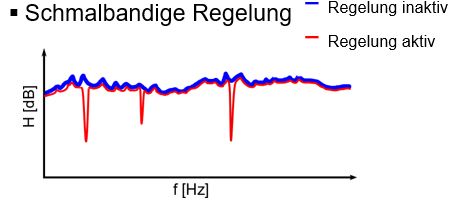
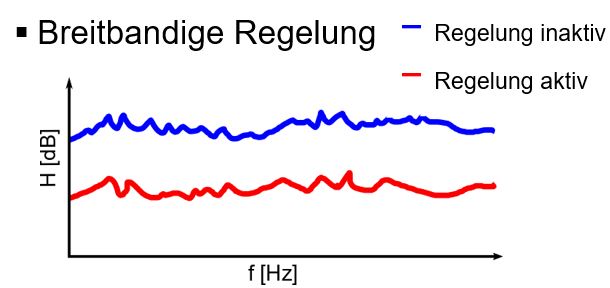
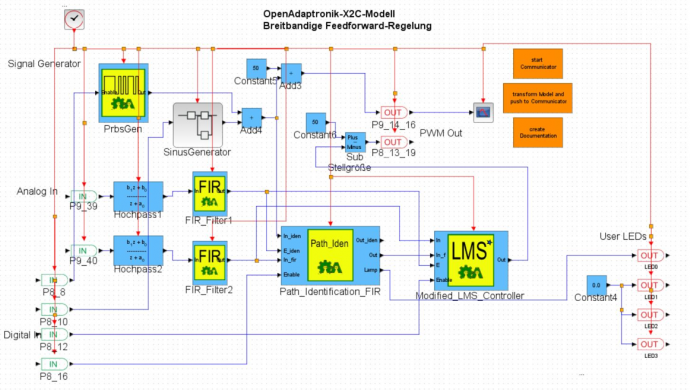
Hallo Zusammen! Ich bin Ruo Yi. Die im letzten Beitrag erläuterte breitbandige Feedforward-Regelung kann eine gute Dämpfungswirkung auf breitbandige Störungen erzielen.
Hallo Zusammen! Ich bin Ruo Yi. In den letzten Beitragen habt ihr vielleicht eine Überblick über die aktive Schwingungsdämpfung erhalten
Hallo Zusammen! Ich bin Ruo Yi. In dem letzten Beitrag habe ich euch eine allgemeine Vorstellung der Methoden der aktiven
Hallo Zusammen! Ich bin Ruo Yi. In den bisherigen Beiträgen habe ich euch die Entwicklung einer kostengünstigen modellbasierten Regelungsplattform auf
Hallo zusammen, wie im ersten Blogbeitrag bereits berichtet, beschäftige ich mich zurzeit mit meiner Master Thesis mit der Entwicklung eines

Dear OpenAdaptronik blog readers, In this post I am gonna talk about defining vocabulary, assumtion about data uploader knowledge and
Hallo Zusammen! Ich bin Ruo Yi. Im letzten Beitrag haben wir über die Inbetriebnahme des BeagleBone Black gesprochen. In der Tat handelt
