
Quadrocopter #6: Aktives System der Schwingungsminderung
Hallo zusammen,
in dem letzten Beitrag von mir wurde das Messsystem für die Schwingungserfassung vorgestellt. Um alle auf das selbe Boot zu holen stelle ich nochmal kurz vor was die Idee hinter dem Ganzen ist. Auf der Drohne entstehen z.B. von der Unwucht der Rotoren Schwingungen, welche direkt an die Kamera, insofern eine vorhanden ist, weitergeleitet werden. Um die Schwingungen an der Kamera zu minimieren habe ich im Rahmen meiner Masterarbeit eine Drohne aufgebaut und für diese ein aktives schwingungsminderndes System konzipiert. Das System wird in diesen Beitrag vorgestellt. Der Aufbau der Drohne und die einzelnen Komponenten wurden in den vorherigen Beiträgen vorgestellt.
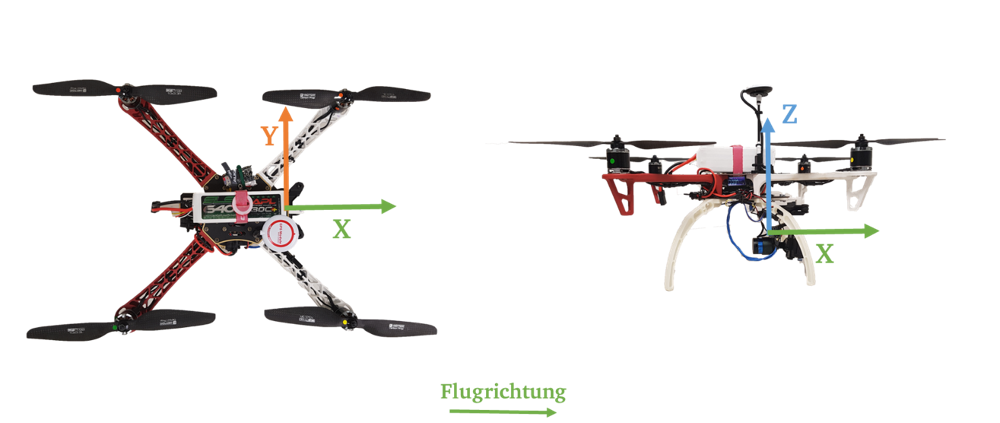
Auf die Ergebnisse der Messungen der Schwingungen bezüglich den letzten Beitrag will ich nicht näher eingehen, da diese stark von der verwendeten Drohne abhängig sind und somit für euch somit nicht so interessant sind. Was lediglich zu erwähnen ist, dass die Schwingungen im Sinkflug am größten sind. Die Ursache dafür ist, dass die Flugregelung im Sinkflug nicht besonders gut regelt. Aufgrund dessen, dass die Schwingungsanalyse ergeben hat, dass die Schwingungen in die Y Richtung am größten sind, wird das aktive System in die Y Richtung entwickelt. Die Definition des Koordinatensystems ist im nächsten Bild gezeigt.
Das Aktive System besteht aus folgenden Kompopenten:
- Aktor
- Sensor
- Leistungsverstärker
- Regelung inklusive Signalverarbeitung (Integrator, Tiefpass, Hochpass)
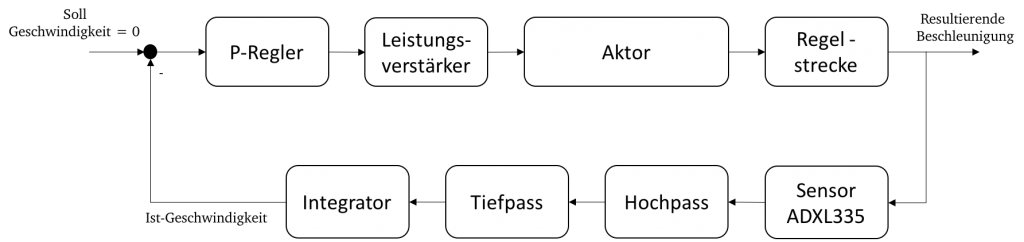
Der geschlossene Regelkreis sieht wie folgt aus:
Für den Aufbau des Gesamtsystems braucht ihr folgende Komponenten:
- Aktor
- 3D Drucker (z.B. im FabLab frei verfügbar)
- Datei zum Drucken: https://www.thingiverse.com/thing:2794939
- 4x Quadermagnet: 3,04 €
- Magnetkleber: 7,95 €
- Kupferlackdraht 0,4 mm: 6,84 €
- Harz Kleber für die Spule: 6,09€
- 3D Drucker (z.B. im FabLab frei verfügbar)
- Sensor
- ADXL335: 9,15 €
- Leistungsverstärker
- Regelung inklusive Signalverarbeitung
- DC-DC Wandler für Operationsverstärker: 20,44 €
- Operationsverstärker TL074CN: 0,63 €
- Kondensatoren: 2 x 220 nF, 68 nF
- Widerstände: 330 kΩ, 4,7 kΩ, 22 kΩ, 330 kΩ
- Sonstiges
- 100 μF Kondensator für Glättung der Spannungsversorgung
- LM7805 5V Spannungsregler für den Sensor
- Lötkolben, Zange, Lötzinn
- Kabel, Schrumpfschlauch, Platine zum bestücken
- Gimbal: Tarot T-2D
Regelung inklusive Signalverarbeitung
Der Sensor ADXL335 liefert eine Spannung mit einem Offset welche der Beschleunigung entspricht. Um diesen Offset zu entfernen wird ein Hochpass mit einer Grenzfrequenz von 2 Hz verwendet. Für hochfrequente Störungen wird zusätzlich ein Tiefpass verwendet. Da die Geschwindigkeit der Kamera geregelt wird, wird ein Integrator mit einem Verstärkungsfaktor implementiert. Der Verstärkungsfaktor repräsentiert den P Regler der Geschwindigkeit.
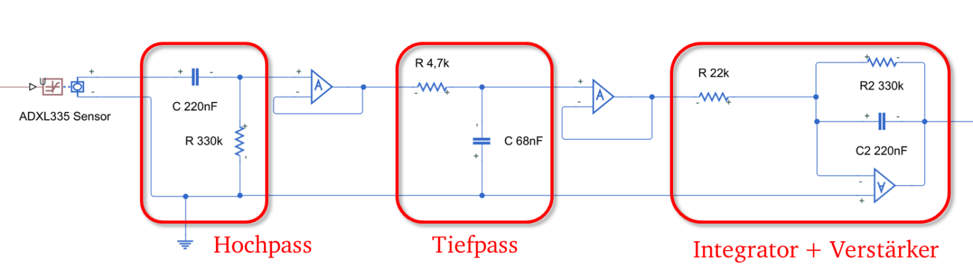
Ich empfehle euch die Schaltung in SPICE oder Matlab Simulink zu simulieren um genau das Verhalten des Schaltkreises zu verstehen. Die fertig gelötete Platine ist im folgenden Bild dargestellt.
Versucht den Schaltkreis auf möglichst engen Raum zu löten, denn auf dem Quadrocopter gibt es nicht viel Platz.
Aktor
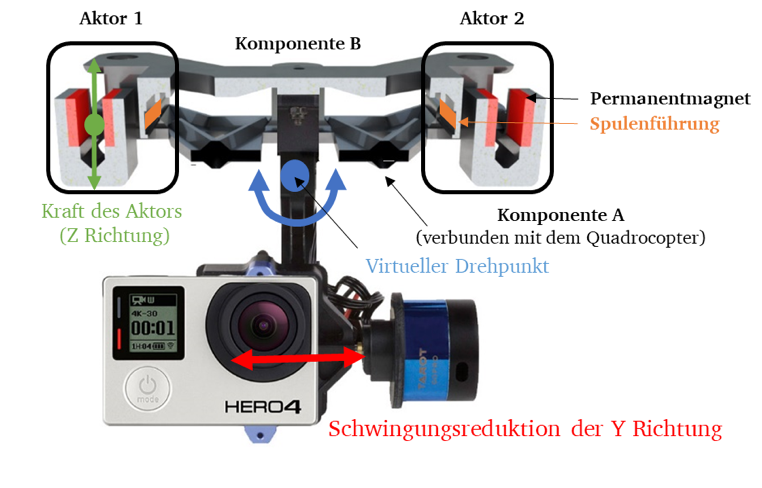
Wie bereits erwähnt wird der Aktor verwendet um die Schwingungen in die Y Richtung zu verringern. Um die Schwingungen in die Y Richtung zu verringern übt der Aktor eine Kraft in die Z Richtung aus und reduziert dabei die Schwingungen in der Y Richtung. Das Funktionsprinzip ist im folgenden Bild dargestellt. Das verwendete Gimbal lautet Tarot T-2D.

Dies bedeutet, dass wir zwei Aktoren welche in die Z Richtung wirken, implementieren.
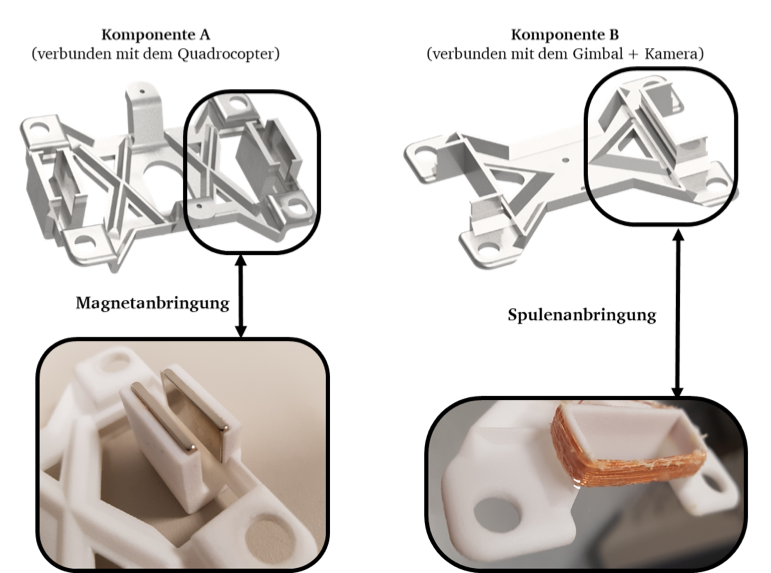
Die Datei zum ausdrucken für den 3D Drucker befindet sich hier: https://www.thingiverse.com/thing:2794939 . Ihr könnte diese nach belieben für euch anpassen wenn dies gewünscht ist. An die untere Platte (Komponente A) klebt ihr die vier Magneten an. Bei der Spule braucht man ein wenig Ausdauer und Geschick, nimmt euch lieber genug Zeit um die Spule gleichmässig zu wickeln. Wickelt die Spule bis ca. einer Spulendicke von 1 mm. Abschließend wird die Spule mit dem Harz Kleber geklebt.
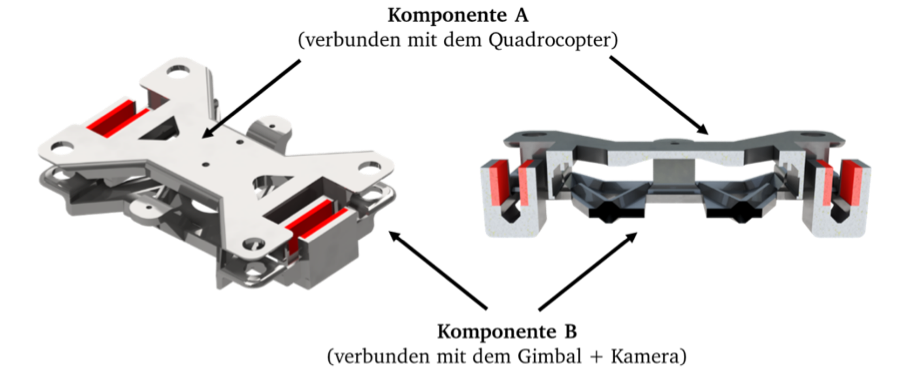
Nun bringt ihr die beiden Komponenten wie folgt zusammen:
Das Funktionsprinzip des Aktors ist nochmal in dem nächsten Bild gezeigt.
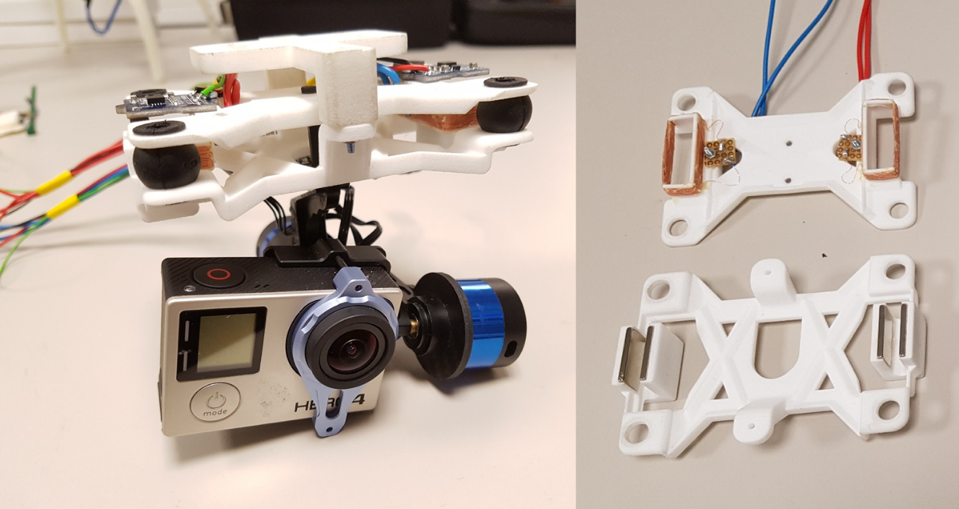
Wenn ihr die Spule und Magneten fertig habt, reicht nur noch die beiden Platten mit einem Gummidämpfer zu verbinden und schon ist der Aktor fertig.
Abschließend müsst ihr alle Komponenten miteinander verbinden. Also der Sensor zu der Reglerplatine, von der Reglerplatine zum Leistungsverstärker und der Ausgang vom Leistungsverstärker wird mit dem Sensor verbunden. Der Beschleunigungssensor wird direkt an die Kamera angebracht, so nah wie möglich am Bildsensor.
Ich hatte für das System zwei Regelkreise mit zwei Sensoren gemacht, damit die zwei Aktoren unabhängig voneinander angesteuert werden können. Für euch reicht nur ein Sensor mit einem Regelkreis. Der Leistungsverstärker steuert dann die beiden Aktoren gleich an. Ihr müsst nur darauf achten, dass die Aktoren gegeneinander arbeiten, sodass das aktive System die Rotationsbewegung dämpft.
Das zusammengeschaltete Gesamtsystem ist im folgenden Bild gezeigt.
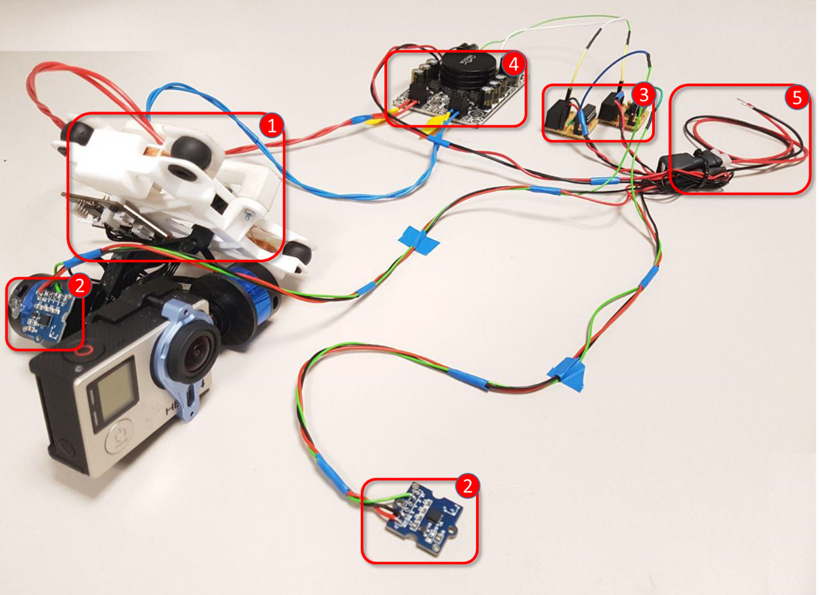
- Aktoren
- Sensor (ADXL335)
- Regelung mit Signalverarbeitung (Hochpass, Tiefpass, Integrator)
- Leistungsverstärker
- 12 V Anschluss mit einer Spannungsglättung für die Spannungsversorgung
Resultat der Schwingungsdämpfung
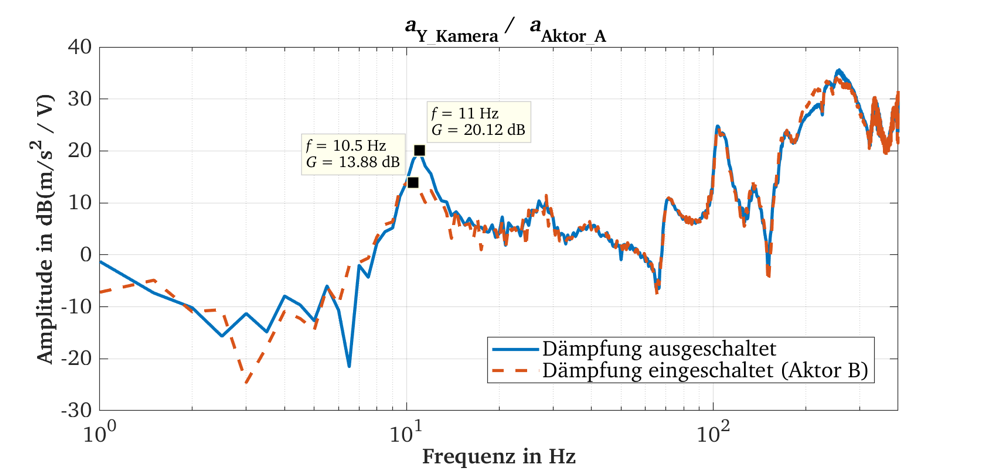
Um die Funktionsfähigkeit leicht zu überprüfen habe ich einen Aktor mit einem Sinus Sweep angesteuert und den anderen Aktor hab ich dazu verwendet um die Schwingungen zu dämpfen. Dies könnt ihr auch selber mit dem mobilen Messsystem für die Schwingungen überprüfen. Die resultierende Übertragungsfunktion zeigt, dass die Schwingungsdämpfung in der Resonanzfrequenz sehr gut funktioniert.
Um zu schauen ob das im Flug tatsächlich funktioniert, bin ich 10 Sinkflüge geflogen und hab ein Vergleich zwischen eingeschalteter und ausgeschalteter Dämpfung gemacht.
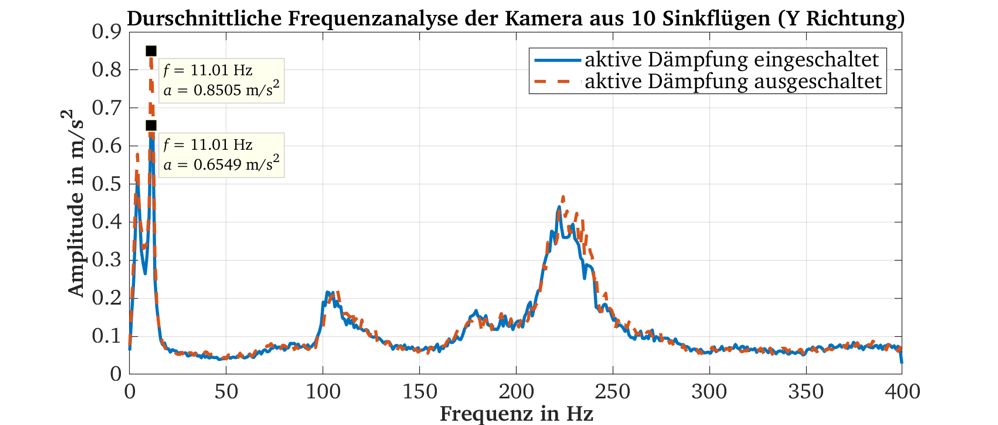
Das Ergebnis zeigt, dass das System eine Verringerung der Beschleunigungen in die Y Richtung um 24 % erreicht. Im Video war davon mit bloßen Auge leider nicht viel zu sehen. Für bessere Schwingungsreduktion könnte das System noch um die X Richtung erweitert werden. Durch die zwei Aktoren ist es aktuell möglich eine Schwingungsreduktion in Z und Y Richtung zu erzielen.
Für höhere Schwingungsdämpfung kann der Aktor optimiert werden wie z.B. die Magnete näher aneinander zu bringen, höhere Anzahl an Windungen.
Für die Reduktion der höherfrequenten Schwingungen wäre es sinnvoll eine modellbasierte Regelung einzuführen. Wie in Beitrag von Nicolas Baleynaud zu sehen ist wird daran fleißig gearbeitet und es sind ebenfalls erste Erfolge zu erkennen.
Wenn ihr Fragen zu dem Aktoren oder zu dem gesamten Regelkreis habt dann schreibt es gerne in die Kommentare. Falls ihr weitere Anregungen und Verbesserungen zu dem System habt schreibt es ebenfalls gerne in die Kommentare.
Liebe Grüße und viel Spaß mit der Schwingungsdämpfung!
Schreibe einen Kommentar