
So geht einfache aktive Schwingungsdämpfung!
So geht einfache aktive Schwingungsdämpfung! Aufbau und Funktionsweise einer aktiven Schwingungsdämpfung am Beispiel eines Messedemonstrators
Hallo zusammen. In der Vergangenheit war der Demonstrator zum Thema aktive Schwingungsdämpfung schon öfters auf Messen (Make Rhein Main, HMI und Laser 2017) und in Posts gezeigt worden.
Nachdem der Demonstrator optisch und elektrisch nun endgültig fertiggestellt wurde, wollen wir uns den Aufbau der eigentlichen Elektronik etwas näher anschauen.
Zur aktiven Schwingungsdämpfung verwenden wir das Prinzip der Geschwindigkeitsrückführung. Dabei wird die Geschwindigkeit der zu dämpfenden Masse gemessen, verstärkt und auf den Aktor zum Dämpfen zurückgeführt. Über die Verstärkung des rückgeführten Signals lässt sich die Stärke der Dämpfung einstellen.
In unserem Demonstrator soll die obere Masse (Halterung des Teleskopes) gedämpft werden. Dazu ist dort ein günstiger Beschleunigungssensor (ADXL335 für 8,5 €[1]) angebracht. Die gemessene Beschleunigung wird durch einen Integrator in eine Geschwindigkeit überführt, mit einem Verstärker (Sure Electronics TPA250 für ca. 28 € [2]) verstärkt und auf den Aktor zum Dämpfen (Visaton EX 45 s für ca. 29 € [3]) gegeben. An dem Teleskop selbst ist noch ein kleiner Laserpointer angebracht. Im Blockschaltbild sind die notwendigen Komponeten gezeigt: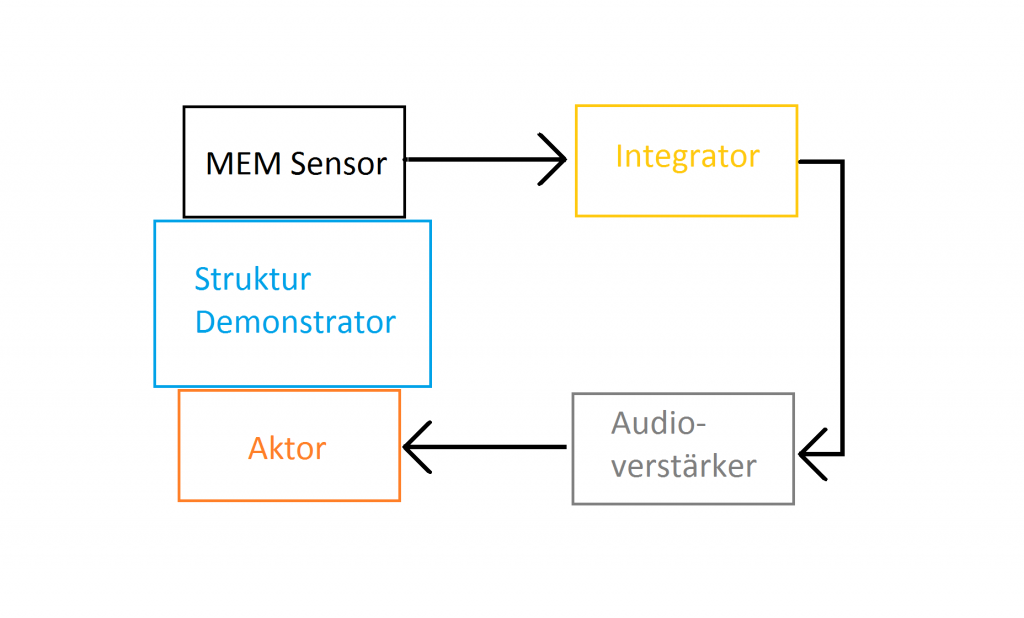
 Die Anregung der Teleskophalterung bzw. das Simulieren von Störungen erfolgt über einen Aktor, der sich im inneren des Demonstrators befindet:
Die Anregung der Teleskophalterung bzw. das Simulieren von Störungen erfolgt über einen Aktor, der sich im inneren des Demonstrators befindet: Für die Elektronik haben wir uns eine Platine fertigen lassen. Hierfür ist das Open Source Programm KICAD zu empfehlen. Fertigen lassen sich selbst erstellte Platinen bei diversen Auftraggebern im Internet. Natürlich kann die Elektronik auch auf einer Lochrasterplatine zusammengelötet werden. Die elektrischen Bauteile hierfür kosten nur ein paar Euro.
Für die Elektronik haben wir uns eine Platine fertigen lassen. Hierfür ist das Open Source Programm KICAD zu empfehlen. Fertigen lassen sich selbst erstellte Platinen bei diversen Auftraggebern im Internet. Natürlich kann die Elektronik auch auf einer Lochrasterplatine zusammengelötet werden. Die elektrischen Bauteile hierfür kosten nur ein paar Euro.
Die Elektronik sitzt zusammen mit dem Verstärker in einer Box. An der Box befindet sich ein Schalter zum Ein- und Ausschalten der aktiven Dämpfung und ein Schalter für das Ein und Ausschalten des Laserpointers.
An der Box befindet sich ein Schalter zum Ein- und Ausschalten der aktiven Dämpfung und ein Schalter für das Ein und Ausschalten des Laserpointers. Die Anschlüsse der Elektronik befinden sich an der Seite. Dort ist die 5V Versorgung von der Elektronik (1), der Stecker für den Sensor und Laser (2), die 24 V Versorgung für den Verstärker (3) und die Anschlüsse für den Aktor (4 und 5) angebracht.
Die Anschlüsse der Elektronik befinden sich an der Seite. Dort ist die 5V Versorgung von der Elektronik (1), der Stecker für den Sensor und Laser (2), die 24 V Versorgung für den Verstärker (3) und die Anschlüsse für den Aktor (4 und 5) angebracht.
Die Platine besteht aus mehreren Funktionsblöcken, die in der folgenden Tabelle kurz aufgeführt sind.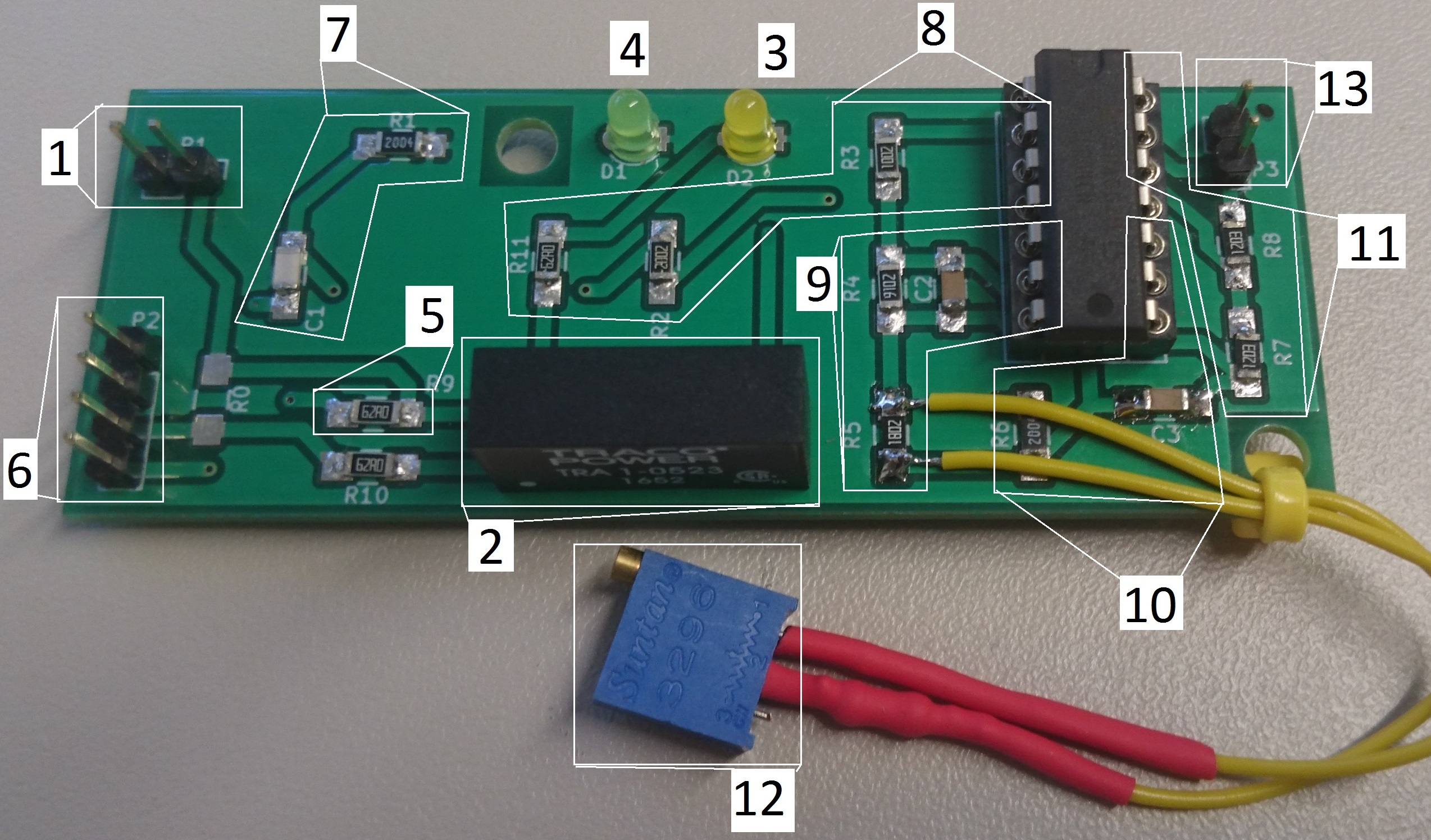 Das Potentiometer (12) wurde im Nachhinein noch angebracht und reguliert die Stärke des Ausgangssignals.
Das Potentiometer (12) wurde im Nachhinein noch angebracht und reguliert die Stärke des Ausgangssignals.
| Nr. | Name | Funktion | Notwendigkeit |
| 1 | Spannungsversorgung | Versorgung der Platine mit 5 V | + |
| 2 | DCDC Wandler (TRA 1-0523) | Liefert +- 15 V für den Operationsverstärker | + |
| 3 | LED gelb | Leuchtet bei Spannungsversorgung | – |
| 4 | LED grün | Leuchtet bei aktivierter Dämpfung | – |
| 5 | Versorgung Laser | Versorgt einen Laser am Demonstrator | – – |
| 6 | Anschluss Sensor | Verbindet den Sensor und Laser. Prinzipiell werden nur 3 Kanäle benötigt (5 V Sensor, GND, Signal) | + |
| 7 | Hochpassfilter (fgrenz = 0,36 Hz) | Bereitet das Sensorsignal auf * | +
|
| 8 | Transimpedanzwandler | Setzt den Eingangswiderstand gegen 0 ** | + |
| 9 | Tiefpassfilter | Filtert hochfrequente Störungen*** | 0 |
| 10 | Integrator | Integriert die Beschleunigung zu einer Geschwindigkeit**** | ++ |
| 11 | Impedanzwandler | Setzt den Ausgangswiderstand hoch***** | + |
| 12 | Potentiometer | Zum Einstellen der Ausgangssignalstärke | 0 |
| 13 | Signalausgang | Anschluss an den Verstärker | + |
++ sehr wichtig + wichtig 0 nicht unbedingt Notwendig – nicht notwendig
* Der Sensor liefert nur eine positive Spannung von 0-3,3 V. Bei einer Beschleunigung von +3 g liefert er 3,3 V, bei – 3 g 0V und bei 0 g 1,65V. Die Beschleunigung hat also ein Offset von + 1,65 V. Das Hochpassfilter mit niedriger Grenzfrequenz eliminiert diesen statischen Anteil von 1,65 V.
** Der Transimpedanzwandler setzt den Eingangswiderstand gegen 0. Dies wird für Sensoren mit Stromquellencharakteristik verwendet.
*** Das Tiefpassfilter filtert hochfrequente Störungen raus. Er ist nicht unbedingt notwendet.
**** Der Integrator ist das Herzstück der Schaltung. Er integriert die gemessene Beschleunigung in eine Geschwindigkeit für die Geschwindigkeitsrückführung.
***** Der Impedanzwandler setzt den Ausgangswiderstand hoch. Damit wird die Schaltung nicht von der nachfolgenden Elektronik beeinflusst.
Hier ist noch der Schaltplan gezeigt. Die einzelnen Systeme der vorherigen Tabelle sind ebenfalls markiert: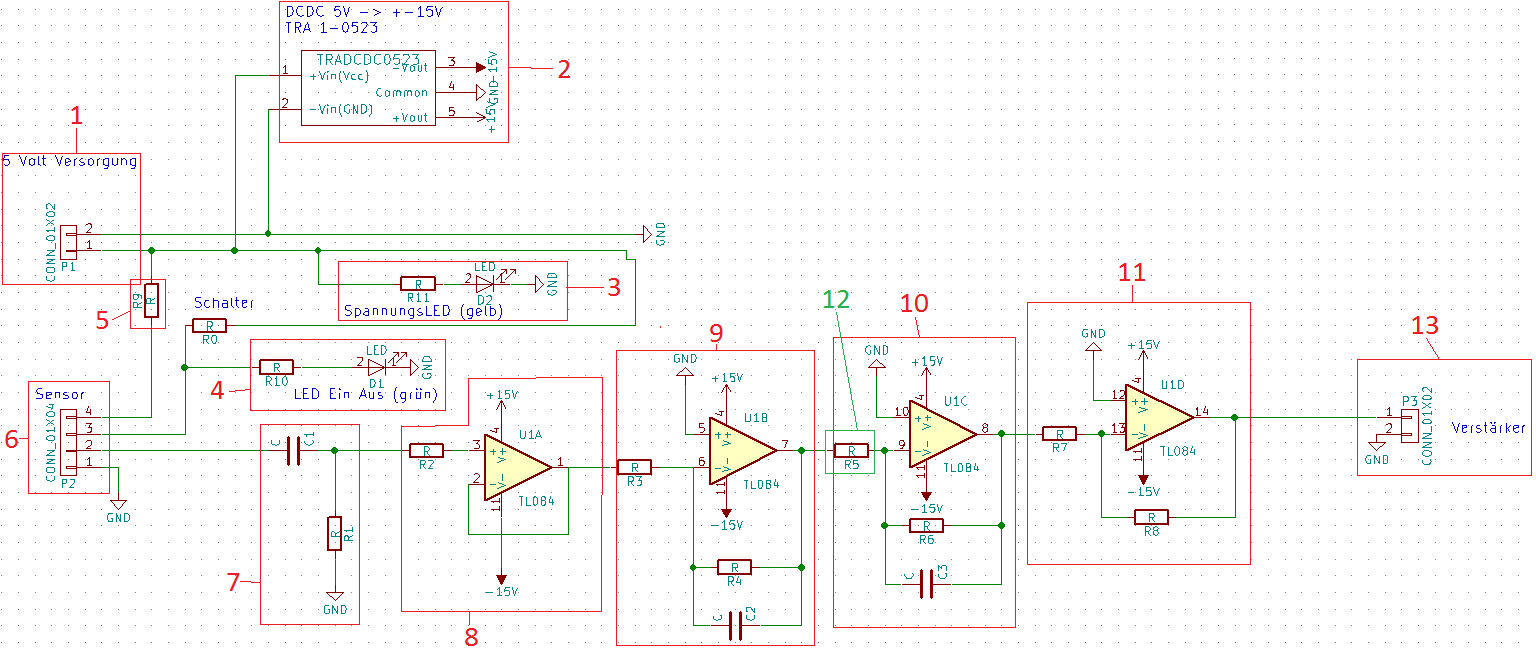 Für die Schaltung haben wir folgende Bauteile verwendet.
Für die Schaltung haben wir folgende Bauteile verwendet.
| R0 | Platzhalter Schalter | |
| R1 | Widerstand des HP-Filters | 2 Meg Ω |
| R2 | Widerstand Transimpedanzwandler | 20 k Ω |
| R3 | Eingangswiderstand TP-Filter | 100 k Ω |
| R4 | Wiederstand TP-Filter | 91 k Ω |
| R5 | Eingangswiderstand Integrator | 18 k Ω |
| R6 | Widerstand Integrator | 2 Meg Ω |
| R7 | Eingangswiderstand Impedanzwandler | 120 k Ω |
| R8 | Widerstand Impedanzwandler | 120 k Ω |
| R9 | Vorwiederstand des Lasers | 62 Ω |
| R10 | Vorwiederstand LED grün | 62 Ω |
| R11 | Vorwiderstand LED gelb | 62 Ω |
| C1 | Kondensator TP-Filter | 220 pF |
| C2 | Kondensator HP-Filter | 220 nF |
| C3 | Kondensator Integrator | 220 nF |
| DCDC-Wandler | TRACO POWER TRA 1-0523 | |
| Operationsverstärker | TL084 | Enthält 4 Operationsverstärker |
[1] https://www.reichelt.de/GRV-3AXIS-ACC1-5/3/index.html?ACTION=3&LA=2&ARTICLE=191205&GROUPID=6671&artnr=GRV+3AXIS+ACC1.5&SEARCH=%252A (28.06.17 14:42)
[2] https://www.hobbyhifiladen.de/sure-electronics-tpa250 (28.06.17 14:55)
[3] http://www.ebay.de/itm/Visaton-VS-EX45S-VISATON-ELECTRO-DYNAMICAL-EXCITER-/401352392978?epid=1404193276&hash=item5d72778112:g:grEAAOSwPh5ZGhH1 (28.06.17 14:57)
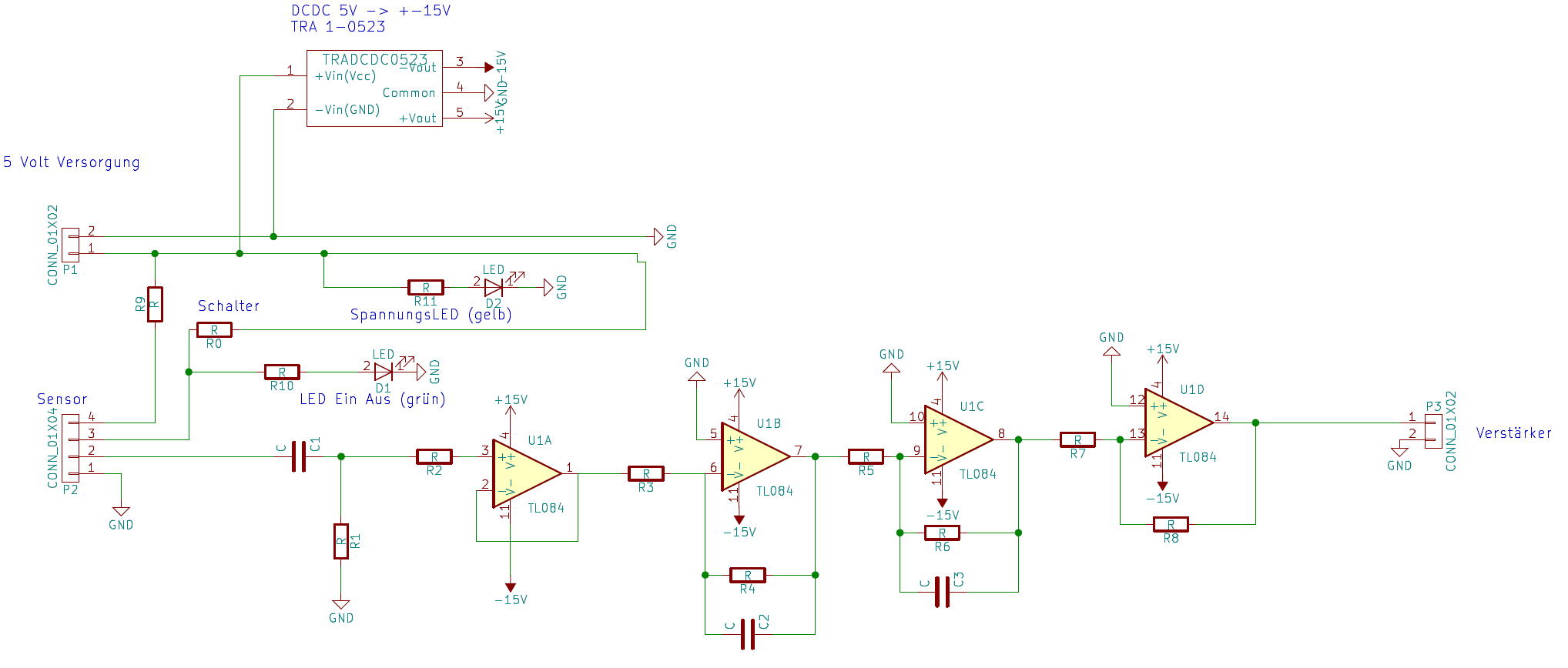
Bilder ohne Markierungen:
Schreibe einen Kommentar