
Hardware zur analogen Regelung – Filter UAF42 #4 : Aktive Schwingungsdämpfung mit UAF42
Hallo Zusammen,
in meinem vorherigen Post ist das UAF42-Filter aus elektronischen Bauteilen auf einem Steckbrett aufgebaut und gemessen worden. Nun in diesem letzten Post soll das Verhalten des Versuchsaufbaus zur aktiven Schwingungsdämpfung des universalen aktiven Filters UAF42 und dem Inertialmassenaktor IMA (Rockwood) in einer Simulation mithilfe von MATLAB und am Ende in einem kleinen Experiment untersucht werden. Die Grundlagen des Aktors (IMAs) sind in den Beiträge von Jonathan Brekenfeld zu finden, deshalb empfehle ich sie durchzulesen, um die Funktionsweise des Aktors zu verstehen.
„Bei der Aufhängung der Masse wird angenommen, dass sie sowohl eine federnde als auch eine dämpfende Eigenschaft besitzt. Demnach kann das mechanische Modell nach Abbildung 25 dargestellt werden. Dabei sind k die Federsteifigkeit, c die Dämpfungskonstante, m die bewegte Masse im IMA, x die Auslenkung der Masse m und F_Fuß die Fußpunktkraft, also die Kraft, die vom Gehäuse auf die Struktur wirkt“.
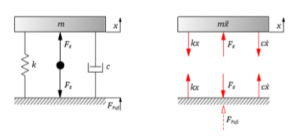
Durch die Aufstellung der Differentialgleichung vom mechanischen System des Aktors (Abb. 1), kann man die Übertragungsfunktion leicht bestimmen, wie folgendes:

Im Laplace-Bereich erhält man für die Ausgangsgröße „Beschleunigung der Masse“:

Anhand dieser Übertragungsfunktion wird eine Simulation durchgeführt. Die Simulations-Parameter sind im Titel des Diagramms aufgeführt.

Anhand der in Abbildung 2 gezeigten Übertragungsfunktion lässt sich das Verhalten des Rockwoods (IMA) gut erkennen. Bei dem eine Resonanz entsteht, die mit dem UAF42-Filter gedämpft werden muss.
Beim Aufbau vom UAF42-Filter mit dem Aktor (IMA) sollen verschiedene Effekte im Übertragungsfunktion-Verhalten entstehen, die abhängig von der Dimensionierung des UAF42s sind. Im nächsten Schritt wird das mit Simulationen und Laborversuchen untersucht.
Simulation des Aktors (IMAs) mit aktiver Schwingungsdämpfung
Bei den verschiedenen Simulationen zur aktiven Schwingungsdämpfung (UAF42 & IMA) soll die UAF42-Schaltung so dimensioniert werden, dass man eine vernünftige aktive Dämpfung an der Resonanzfrequenz vom IMA erhält. Mit der Matlab-Funktion „feedback“ lassen sich die zwei Systeme nach der Eingabe der passenden Werte von den Bauelementen schnell simulieren. Man kann auch durch das untenstehende beispielhafte Simulink-Modell die Simulationen durchführen.

Der Aktor (IMA) wird mit einer Rückführung über drei Gains und das UAF42-Filter simuliert. Im Prinzip hat die Funktion „feedback“ die gleiche Struktur wie das angezeigte Simulink-Modell (Abb.3), aber ohne die drei Gains, diese sollte man selbst in Übertragungsfunktionen vom UAF42-Filter übernehmen. Das Gain1 ist der elektrische Kopplungsfaktor im Aktor (IMA) und das Gain2 ist die Empfindlichkeit des Beschleunigungssensors, die von [mV/g] auf [V/g] umgerechnet ist.
Bei der ersten Simulation wird versucht, mit einer Anpassung der UAF42-Schaltung eine aktive Dämpfung an der Resonanz der Inertialmasse zu erzeugen. Dafür sind folgende Simulation-Parameter nötig: Rq=10KΩ; Rg=51 KΩ; Rf1=Rf2=16KΩ; R4=R2=50KΩ; und C1=C2=0,22µF=220nF.

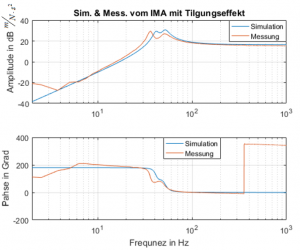
Wenn man jetzt nur den Rq Widerstand von den Simulations-Parameter auf Rq=5.1KΩ ändert, das heißt die Güte Q der Übertragungsfunktion anpasst, beobachtet man einen Tilgungseffekt in dem System (IMA&UAF42), Siehe die Abbildung 5:

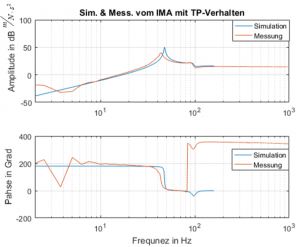
In diesem Fall könnte man für eine schnelle Anpassung des Verhaltens den Rq-Widerstand durch einen Drehpoti ersetzten. Mit einer Änderung in den Kondensatoren C1 und C2 und wieder im Rq-Widerstand lässt sich die Simulation des System (IMA&UAF42) auch mit dem Tiefpassverhalten durchführen. Für Rq=2KΩ und C1=C2=0,1µF=100nF passiert mit Tiefpassverhalten folgendes in der Simulation. Man beobachtet eine Erhöhung der Steifigkeit im System und damit eine Erhöhung der Resonanzfrequenz.

Wenn nun Rq=2KΩ und C1=C2=0,047µF=47nF so gewählt sind und der Rest der SimulationsParameter unverändert bleibt, ist die Simulation mit Bandpassverhalten möglich, siehe Abb. 7: Man beobachtet einen Neutralisationseffekt in der Übertragungsfunktion.

Kurze Zusammenfassung der Simulation zur aktiven Schwingungsdämpfung (IMA&UAF42):
Durch die Simulation der beiden Systemen (IMA&UAF42) mithilfe der feedback-Funktion ist es festzustellen, dass bei der Anpassung der veränderlichen Bauelemente unterschiedliche Effekten im Übertragungsverhalten vom Aktor zu erhalten sind. Mit dem UAF42 lassen sich neben einer aktiven Schwingungsdämpfung ebenfalls Tilgungseffekte, eine Erhöhung der Steifigkeit oder Neutralisationseffekte erzeugen.
Untersuchung des aktiven Schwingunsdämpfung-Systems (IMA&UAF42) im Experiment
Im Folgenden geht es nochmal um die Prüfung des Verhaltens von Aktor zusammen mit dem UAF42-Filter allerdings in einem Laborversuch. Das Ziel des Versuchs ist es zu zeigen, dass gezielte Schwingungsstörungen am Aktor (Rockwood) in verschiedenen Frequenzen mittels des UAF42-Filters gedämpft werden können. Dazu werden wiederum die vorherigen Simulations-Parameter in dem Versuchsaufbau für jeden entsprechenden Fall verwendet.
Eine Anmerkung zu den Simulations- und Messungsergebnissen ist am Ende dieses Abschnittes kurz zusammenzufassen.
Der Prüfstand ist nach diesem folgenden Schema aufgebaut:

Am Minus-Anschluss des Addieres wird das Eingangssignal vom ONO SOKKI mit dem Rückführungssignal vom Rockwood über den Beschleunigungs-Sensor und anschließend über das UAF42-Filter addiert. Zwischen dem Rockwood und dem UAF42-Filter ist ein einfacher Hochpass mit niedriger Grenzfrequenz und ein einfacher invertierenden Verstärker (Invertierer) ergänzt worden. Der Invertierer dient dazu Hochpass-Signal zu invertieren, um das richtige Vorzeichen in der Schaltung zu erhalten. Der Hochpass-Filter ist dafür gedacht, einen DC-Offset im Signal des Sensors zu beseitigen.
Die nachstehende Abbildung zeigt den Versuchsaufbau:

Messergebnisse
Durch den Umbau der UAF42-Schaltung mit den entsprechenden Simulations-Parametern (unter dem Abschnitt „Simulation des Aktors“) erhält man folgende Messungen. Der TIRA-Verstärker muss auf Current-Mode (Stromvorgabe) eingestellt werden, denn durch Stromfluss im Rockwood wird eine proportionale Anregungskraft erzeugt.
In folgenden Diagrammen werden die Simulationen und Messungen zusammen abgefasst:
Simulation und Messung vom IMA ohne den Regler-Teil sieht folgendermaßen aus:

Simulation und Messung der aktiven Schwingungsdämpfung sieht so aus:

Simulation und Messung vom IMA mit dem Tilgungseffekt des Reglers:
Simulation und Messung zur Steifigkeitserhöhung sieht so aus:
Simulation und Messung der Schwingungsneutralisation bei ca. 220 Hz sieht so aus:

Wie man sieht, die Messungen bestätigen vor allem durch eine Abweichung der Modellparameter des IMA die erreichten Simulation-Ergebnisse aber einen Hinweis gibt es jedoch. Am Amplitudengang von der Messungen ist in der Wahrheit die maximale Amplitude gleich ungefähr 1,50 dB, was im Vergleich mit der Amplitude der Simulation (ungefähr 47 dB) sehr klein ist. Dieser Unterschied entstand dadurch, dass bei den Messungen die Empfindlichkeit vom Beschleunigungssensor und TIRA-Verstärker berücksichtig werden müssen.
Dies könnte behoben werden, indem man diese Verstärkungsfaktoren nachträglich berücksichtigt.
Bei der Zusammendarstellung von den Simulationen und Messungen in MATLAB wurde der Verlauf von Messergebnissen am Amplitudengang um 35 dB und am Phasengang 180 Grad noch oben verschoben. Somit ist die Sensor-, und TIRA-Verstärkerempfindlichkeit mitberücksichtig worden.
Mit diesem Experiment wurde gezeigt, dass mit dem UAF42-Filter im Frequenzbereich von bis etwa 220 Hz bestimmte Effekte zur aktiven Schwingungsminderung (aktive Dämpfung, aktive Schwingungstilgung, aktive Steifigkeitserhöhung und aktive Neutralisation) eingestellt werden können. Somit ist das universale aktive UAF42-Filter gut geeignet für die aktive Schwingungskontrolle von unterschiedlichen Schwingungssystemen.
Mit diesem Beitrag endet meine Zeit im OpenAdaptronik-Team, so verabschiede ich mich von euch und wünsche euch viel Erfolg.
Schreibe einen Kommentar