
Hallo Zusammen, Das OpenAdaptronik-Projekt geht langsam dem Ende entgegen. Daher möchte ich euch heute einmal alle Ergebnisse des Aufbaus unserer
Hallo Zusammen! Ich bin Ruo Yi. Im letzten Beitrag habe ich euch den Prüfstand und die Regelmodelle zur Validierung der
Hallo Zusammen! Ich bin Ruo Yi. In den vorherigen Beiträgen habe ich euch die Entwicklung und Inbetriebnahme der Regelungsplattform vorgestellt.
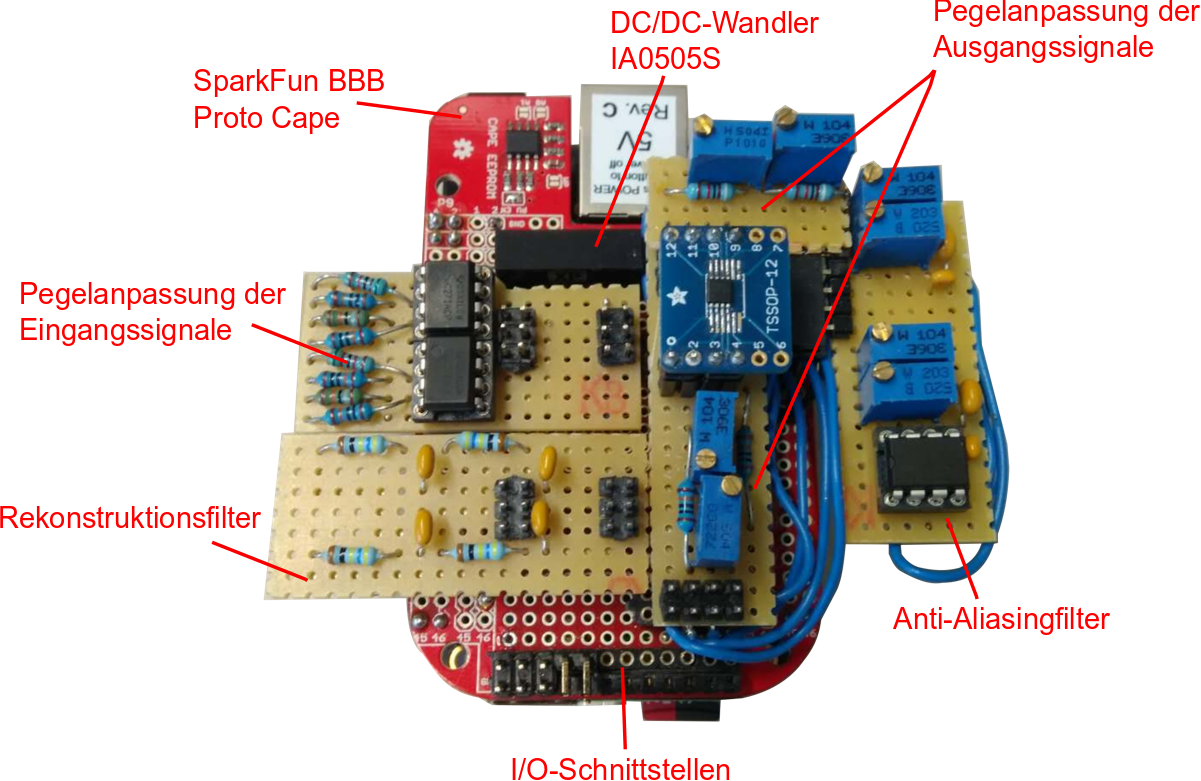
Hallo, ich bin Ruo Yi. Im letztem Beitrag habe ich den prototypischen Aufbau (Entwicklungsboard) der kostengünstigen modellbasierten Regelungsplattform beschrieben. Nun
Hallo zusammen! Mein Name ist Ruo Yi. In dem letzten Beitrag habe ich den Hintergrund und die Zielsetzung meiner Masterarbeit

Hallo zusammen! Mein Name ist Ruo Yi. Ich bin Student in der Fachrichtung Elektro- und Informationstechnik an der TU-Darmstadt. Seit
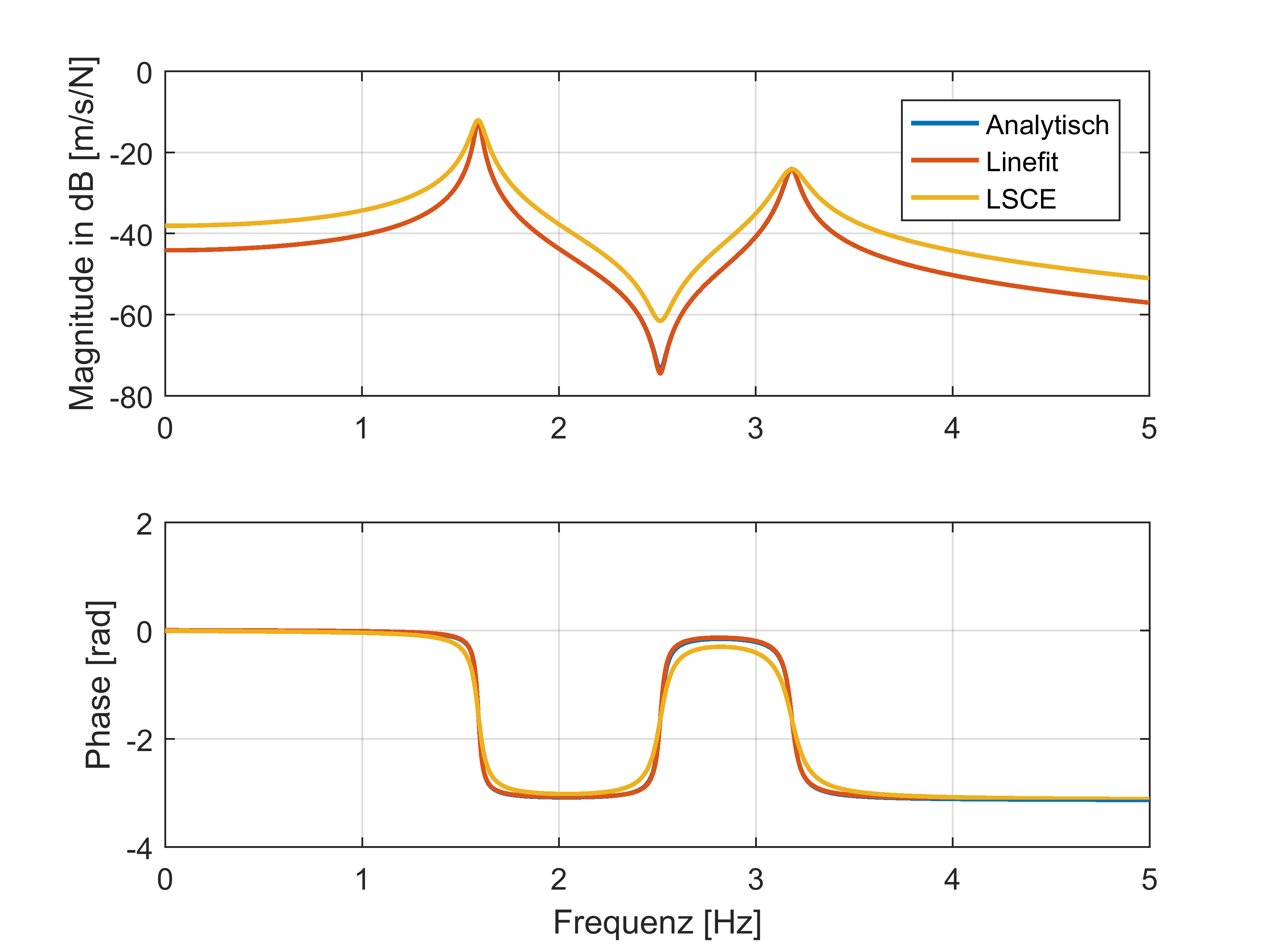
Hallo zusammen! Im vorherigen Post habe ich einen analytischen Zweimassenschwinger mit dem Software-Tool Easymod identifiziert. Als nächstes schauen wir uns
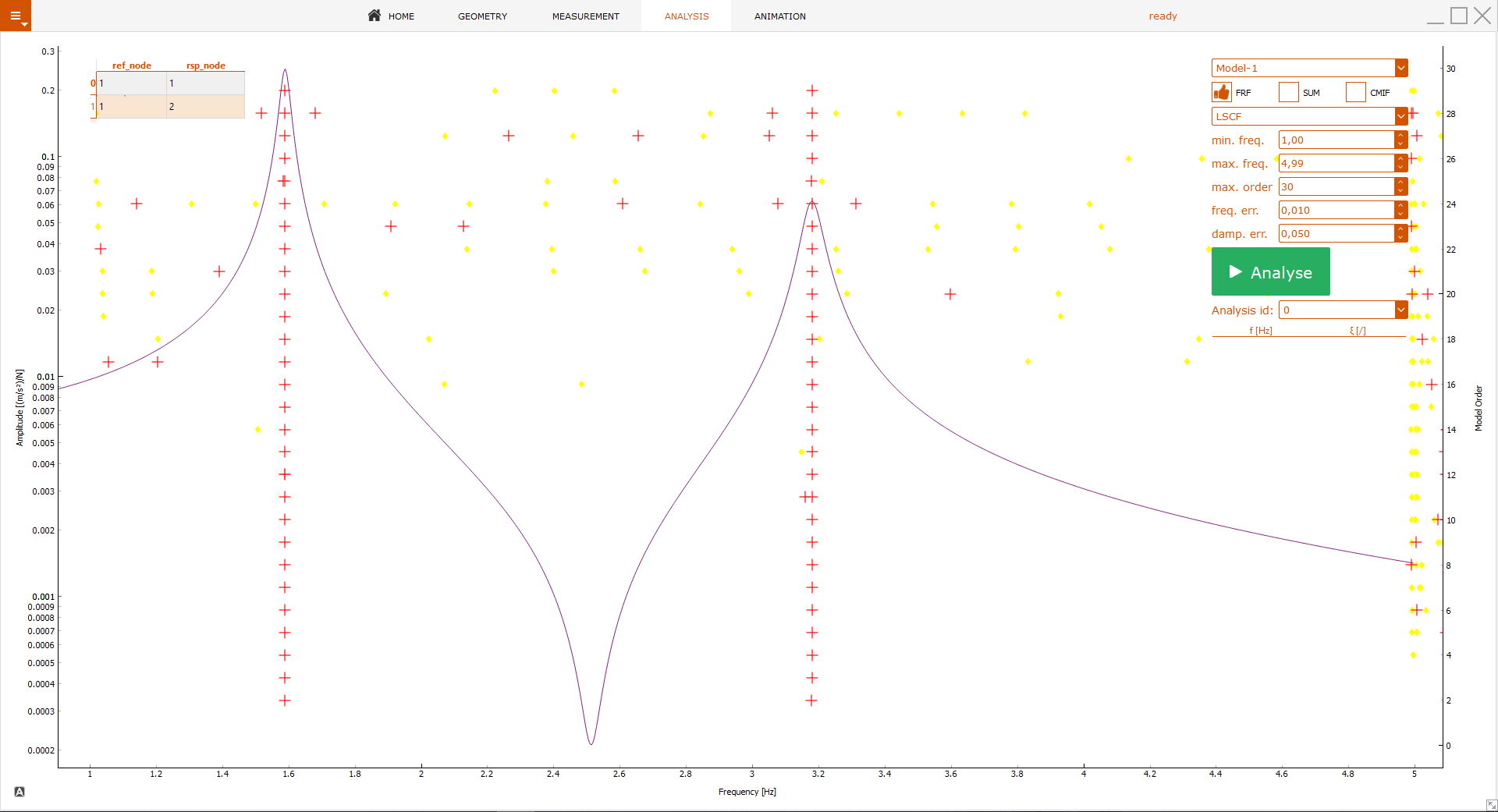
Hallo zusammen! Mit reichlich Verspätung melde ich mich mal wieder zum Thema „Modalanalyse mit Open-Source-Tools“. Im vorherigen Post habe ich
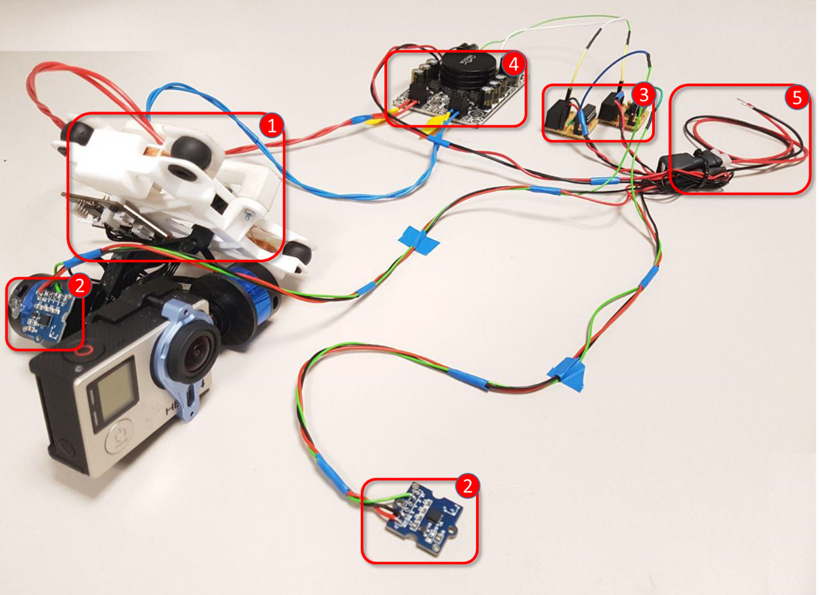
Hallo zusammen, in dem letzten Beitrag von mir wurde das Messsystem für die Schwingungserfassung vorgestellt. Um alle auf das selbe Boot
