
Modellbildung von LowCost-Aktoren – #2
Hallo,
nach längerer Pause im Anschluss meines einleitenden Posts werde ich nun einige Ergebnisse meiner Arbeit der letzten Wochen vorstellen.
Beginnen werde ich für alle Interessierten mit einer kurzen Erläuterung meines Simulationsmodells für die Inertialmassen-Aktoren (IMA). Dieser Post wird also etwas theoretischer und trockener Natur sein.
Auf die grundlegende Funktionsweise eines IMA geht Manuel bereits in einem Post ein.
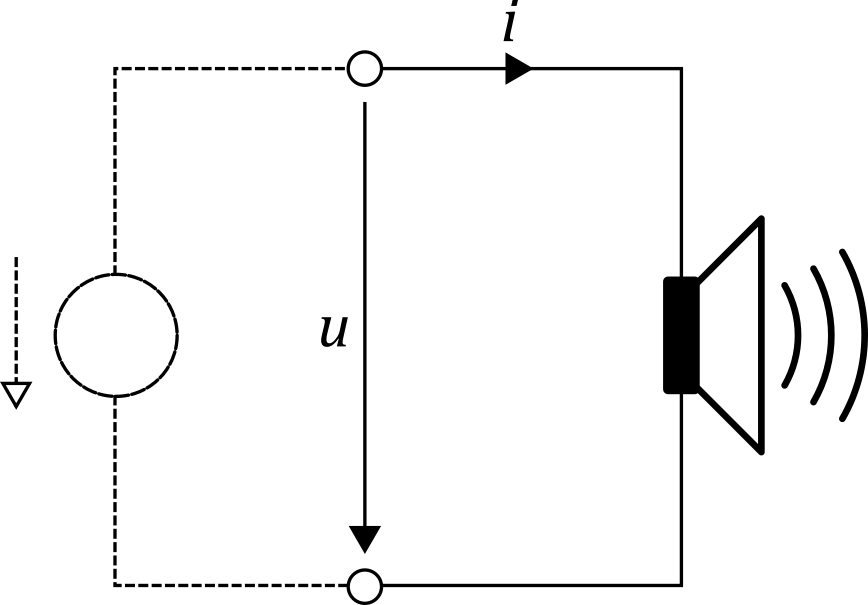
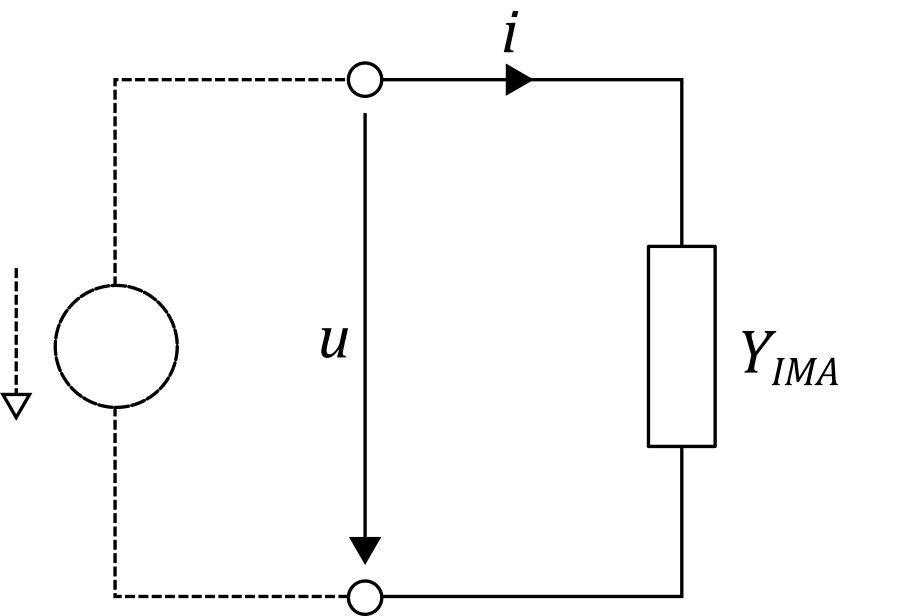
Für die mathematische Beschreibung des Aktors ist das Verhalten zwischen Strom ([latex]I[/latex]) und der Spannung ([latex]U[/latex]) in Abhängigkeit von der Frequenz ([latex]f[/latex]) von Interesse. In der Aktorik hat sich dafür im Laplace- (Frequenz-) Bereich die Betrachtung der elektrischen Admittanz etabliert. Sie ist definiert durch [latex]Y(s)=\frac{I(s)}{U(s)}[/latex] und stellt damit die direkte Übertragungsfunktion zwischen Ein- und Ausgang unseres Aktors aus Sicht des Leistungsverstärkers dar. Für den Leistungsverstärker stellt die resultierende elektrische Admittanz (im Folgenden mit [latex]Y_{IMA}[/latex] gekennzeichnet) die zu treibende Last dar.
Betrachtet man den Aktor im blockierten Zustand (Spule und das sie durchsetzende Magnetfeld des Permanentmagneten führen keine Relativbewegung zueinander aus), so ergibt sich die elektrische Admittanz lediglich aus der Betrachtung des rein elektrischen Systems. Dieses wird angenommen als Reihenschaltung aus einem ohm’schen Widerstand [latex]R[/latex] und einer Induktivität [latex]L[/latex].
[latex]Y_E(s)=\dfrac{I(s)}{U_a(s)}=\dfrac{1}{s\cdot L+R}[/latex]
(Die Indizes sind der Allgemeingültigkeit wegen bereits auf die folgende Abbildung bezogen)
Dadurch, dass sich Spule und Magnetfeld in der späteren Anwendung allerdings relativ zueinander bewegen, kommt es zu einer Gegeninduktion. Diese wirkt entgegen der angelegten Spannung.

Die Gegeninduktion ist abhängig von der Geschwindigkeit der Relativbewegung. Das mechanische System hat demnach einen Einfluss auf das elektrische Verhalten.
Für die Beschreibung des mechanischen Systems wird analog zum elektrischen System die mechanische Admittanz betrachtet. Diese ist definiert durch [latex]Y_M(s)=\frac{V(s)}{F_E(s)}[/latex] , mit der Relativgeschwindigkeit [latex]V[/latex] zwischen Spule und Magnetfeld und der, zwischen Magnetfeld und Spule wirkenden (Lorentz-)Kraft [latex]F_E[/latex]. Mit der Annahme einer sowohl federnden als auch dämpfenden Wirkung der Aufhängung des Magneten und der Inertialmasse um die Spule, ergibt sich für die mechanische Admittanz die folgende Übertragungsfunktion:
[latex]Y_M(s)=\dfrac{V(s)}{F_E(s)}=\dfrac{s}{ms^2+cs+k}[/latex]
Dabei ist [latex]m[/latex] die Inertialmasse, [latex]c[/latex] die Dämpfungskonstante und [latex]k[/latex] die Federsteifigkeit.
Um die Kopplung zwischen mechanischem und elektrischem System mathematisch zu beschreiben, wird in der Aktorik vereinfacht ein Kopplungsfaktor eingesetzt. Dieser beschreibt letzten Endes die Lorentzkraft und das Induktionsgesetz.
[latex]\begin{aligned}\Psi\cdot i &= F_E \\ \Psi\cdot v &= u_{ind}\end{aligned}[/latex]
Wird das bisherige Modell in die Blockschaltbild-Algebra übertragen,

lässt sich nun die resultierende elektrische Admittanz mit den Regeln der Blockschaltbild-Algebra leicht ablesen:
[latex]Y_{IMA}(s)=\dfrac{I(s)}{U(s)}=\dfrac{Y_E}{1+\Psi^2 \cdot Y_E \cdot Y_M}[/latex]
Auf Grundlage dieses Modells wird das Simulationsmodell aufgebaut. Die Simulationsparameter sind demnach:

Die Simulation wird von mir vorerst mit MATLAB und Simulink vorgenommen. Manuel wird das generelle Vorgehen bald in einem Post anhand von SciLab/XCOS erläutern.
Schreibe einen Kommentar