
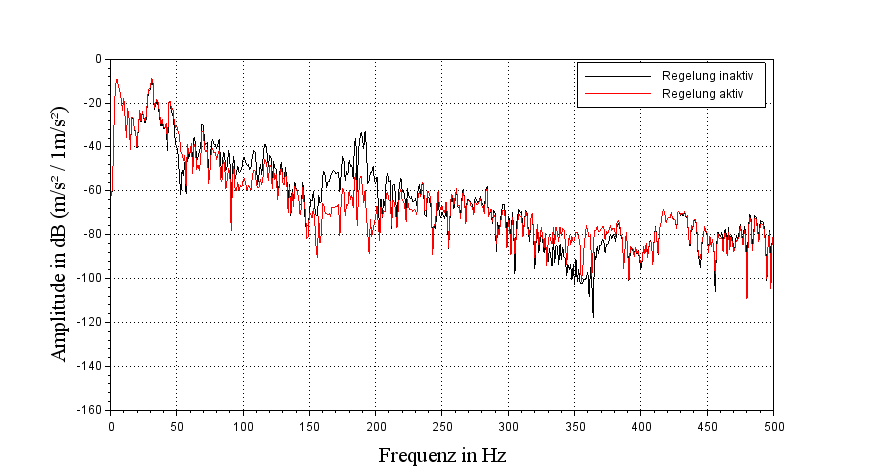
Zum vorherigen Beitrag: Implementierung der Reglervarianten Hallo liebe OpenAdaptroniker, Heute erzähle ich abschließend von der Implementierung des aktiven Schwingungsminderungssystems
Zum vorherigen Beitrag: Identifikation sekundärer Pfad und Wahl der Reglerparameter Zum nachfolgenden Regler: Erste Prototypisierung mit einem DSpace System

Zum vorherigen Beitrag: Digitale Signalverarbeitung, adaptiver FxLMS-Regler Zum nachfolgenden Beitrag: Gesamtsystemsimulation – Implementierung der Reglervarianten Hallo liebe OpenAdaptroniker, Heute mache

Zum vorherigen Beitrag: Modellierung der Quadrocopterstruktur Zum nachfolgenden Beitrag: Gesamtsystemsimulation – Identifikation des sekundären Pfads, Wahl der Reglerparameter Hallo

Zum vorherigen Beitrag: Modellierung des Gesamtsystems Zum nachfolgenden Beitrag: Digitale Signalverarbeitung, adaptiver FxLMSRegler Hallo Liebe OpenAdaptroniker, Heute geht es weiter

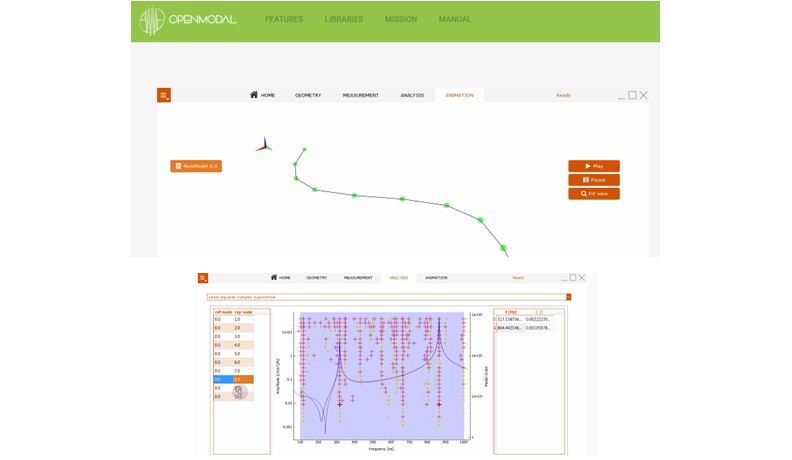
Zum vorherigen Beitrag: Erste Erfahrungen mit Openmodal Zum nächsten Beitrag: Modellierung der Quadrocopterstruktur Hallo Liebe OpenAdaptroniker, Da
Zum vorherigen Beitrag: Methodische Modellierung in Scilab/Xcos eines Massen-Schwingers. Zum nachfolgenden Beitrag: Modellierung des Gesamtsystems Im Rahmen meiner Arbeit

Hallo Liebe Openadaptroniker, Kurz zu mir, da ich heute meinen ersten Beitrag schreibe: Ich bin Nicolas, 24 Jahre alt
